Remotely Piloted Aircraft for RCAF Search and Rescue Operations
Info: 9405 words (38 pages) Dissertation
Published: 16th Dec 2019
Tagged: Aviation
I. Introduction and background information
In Canada, Search and Rescue (SAR) is a shared responsibility divided between numerous partnerships. These partnerships are made up of government, military, volunteer, academic and industry groups that work together to provide SAR services under a program known as the National Search and Rescue Program (NSP). The Federal Government is responsible for aeronautical and maritime SAR through the Canadian Armed Forces (CAF) and Canadian Coast Guard (CCG). Ground SAR in National Parks and Historic Sites is undertaken by Parks Canada. The various provinces and territories are responsible for their own SAR response on land and inland waters. Volunteers play an integral role across the air, maritime and ground domains through organizations such as the Civil Air Search and Rescue Association (CASARA).[1]
Providing SAR coverage in Canada is a very difficult task for a multitude of reasons. The Canadian SAR Area of responsibility (AOR) stretches over 18 million square kilometers from 1,500 km west of Vancouver Island to the North Pole and halfway across the Atlantic Ocean[2]. This large AOR is complicated by a varied population distribution. In Canada, the majority of the population is concentrated the southern areas leaving most of Canada’s north sparsely populated causing a complication for the positioning of SAR aircraft. This vast area also brings challenges due to the varied and austere terrain, and extreme weather conditions. As an example, the seasonal temperature variation alone in Winnipeg, Manitoba, ranges from minus 45°C to plus 35°C. In addition to all these factors, Canada has a high level of commercial and recreational activity, with about 12 million aircraft movements and over six million boaters out on coastlines and waterways in any given year.[3]
The Royal Canadian Air Force (RCAF) employs SAR aircraft placed strategically across Canada, with five primary SAR squadrons based at Gander, Newfoundland & Labrador; Greenwood, Nova Scotia; Trenton, Ontario; Winnipeg, Manitoba; and Comox, British Columbia. These Squadrons operate the following fixed and rotary-wing aircraft types; CC-115 Buffalo (Comox), CC-130H Hercules (Winnipeg, Trenton, and Greenwood), CH-149 Cormorant (Comox, Gander, and Greenwood) and CH-146 Griffon (Trenton) as primary SAR platforms. The CC-115 Buffalo and CC-130H are currently in the process of being replaced by the Fixed-Wing SAR (FWSAR) competition selection of the Airbus C-295. In addition to the primary SAR units, any RCAF aircraft can be tasked for a secondary SAR mission. Figure 1 is an overview of the disposition of SAR assets in Canada.
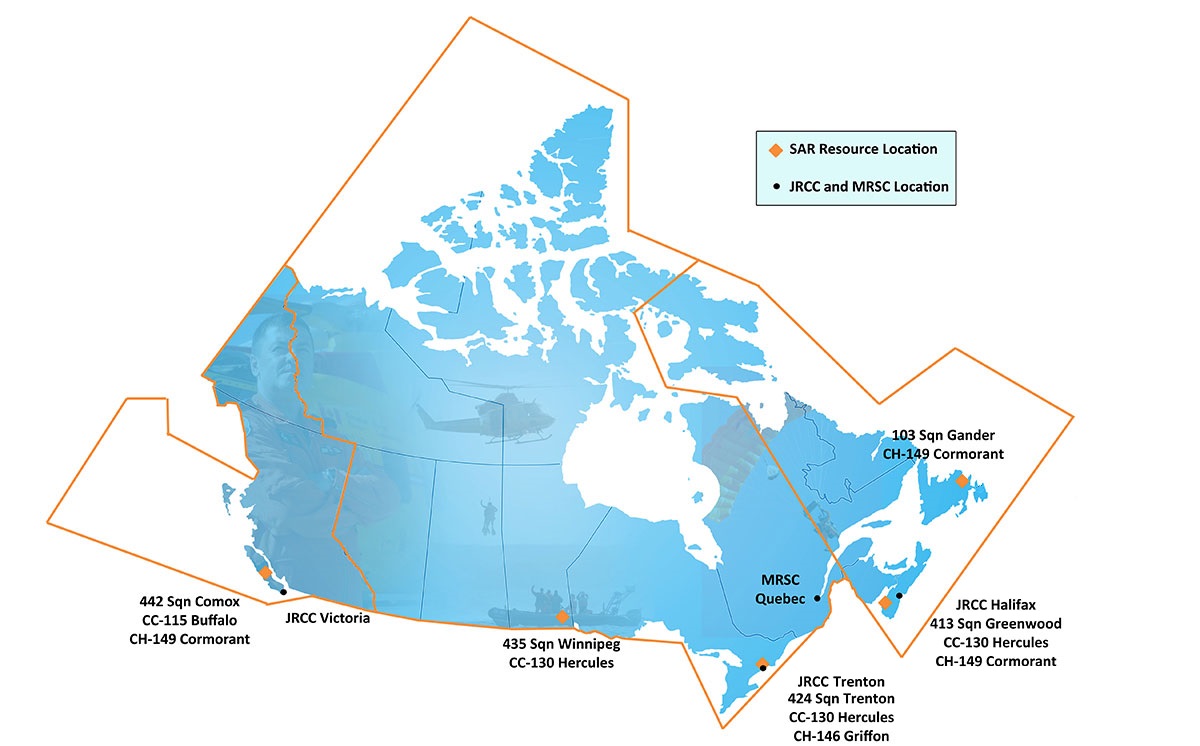
Figure 1 Primary Search and Rescue in Canada[4]
Strong, Secure, Engaged, released in 2017 as Canada’s new defence policy, lists SAR as a core mission of the CAF.[5] The acquisition of Remotely Piloted Aircraft (RPA) is described as a future investment for the RCAF. Although RPA may seem like a new concept, many terms have been used to describe this technology over the years: Drones, Remotely Piloted Vehicle (RPV), Uninhabited Aerial Vehicle (UAV), Unmanned Air Vehicle (UAV) and, most recently, Remotely Piloted Aircraft (RPA). The entire launch and recovery system, including the RPA, is referred to commonly as a Remotely Piloted Aircraft System (RPAS). This technology has a long history of research and development in Canada.
Following the termination of the Avro Arrow program in 1959, early developments of RPAS for domestic and export-market military requirements in Canada began. Canadair spearheaded some of these early programs in 1963, with the development of the CL-89 aka AN/USD-501, which was developed for the armies of Canada, UK, and the Federal Republic of Germany. Although, these were very rudimentary systems, they set the baseline for RPA research and development in Canada. Fast-forward to 1998 when Insitu, a small American company at the time, launched their Aerosond aircraft from Newfoundland to Scotland. The Aerosonde took approximately 26 hours and 45 minutes, having consumed only 5.7L of fuel.[6] RPAs are generally used for missions that are considered too dull, dirty, or dangerous for manned assets.
Recently, for the purpose of Intelligence, Surveillance and Reconnaissance (ISR), the CAF acquired the French Sperwer and the Israel Aerospace Industries Heron, designated the CU-170. The Heron was used in theatre until combat operations in Afghanistan ended in 2011. RPAs have been deployed on various CAF/RCAF operations in the past and can offer numerous advantages, such as their ability to stay airborne longer, provide flexible payload options, and cover a range of missions from ISR to Search and Rescue.
II. Aim
The use of RPAs by the RCAF would increase the effectiveness of current SAR operations in Canada.
III. Outline
In order to discuss how RPAs can increase the effectiveness of current SAR operations in Canada the following subjects will be discussed:
- Automation and Levels of Interoperability (LOI)
- RPA Types and Payloads
- SAR Mission Parameters
- Northern Applications
- Supplementary options
- Conclusion
- Recommendations
IV. Automation and interoperability standards
The flight crews of today are expected to utilize highly automated systems, which are characterized by reliable and deterministic behaviour. The RCAF is transitioning from older fleets that employ “hands and feet” manual control methods to a semi-autonomous human in-the-loop supervisory control methodology found on new airframes, such as the CH-148 Cyclone. The Oxford dictionary defines autonomy as “Freedom from external control or influence; independence”.[7] Automation offers numerous advantages to the operation of RPAs, such as: the reduction of operator workload, reduction of possible operator errors, and a reduction in the use of bandwidth.[8] Current research and standards pertaining to automation and interoperability between RPAs and manned platforms will be discussed.
The term cognitive workload is used to define the amount of work that the operator has to undergo in order to execute the mission tasking’s. The use of automation directly affects the level of cognitive workload that an operator experience when controlling an RPA. For example, a study by Cummings determined that during a targeting mission an operator could control up to four RPAs at once without experiencing mission degradation. A shortcoming of highly automated supervisory control scenarios is that it can be difficult for operators to sustain attention, commonly referred to as “babysitting the automation”.[9] A reference to all the levels of automation are shown in table 1.
| High | 10 | Full Autonomy: The computer makes all decisions, acts autonomously, and ignores the human operator. |
| 9 | The computer informs the human operator, only if it “decides” to. | |
| 8 | The computer informs the human operator, only if asked to. | |
| 7 | The computer executes automatically, and then informs the human operator as necessary. | |
| 6 | Allows the human a limited amount of time to veto an action before it is automatically executed. | |
| 5 | The computer executed the suggestion with approval from the human operator. | |
| 4 | The computer suggests one alternative. | |
| 3 | The computer narrows the decision-making to a few selections. | |
| 2 | The computer offers a complete set of decision / action alternatives. | |
| Low | 1 | Manual Operation: The computer offers no assistance to the human operator, who must make all the decisions and take all actions. |
Table 1 – The Ten Levels of Automation (LOA) [10]
Automation can act as a method to mitigate unintended operator errors. A possible scenario could be an automatic action taken when an unsafe flying condition is detected. Thru what is considered a level of automation six, the computer of the RPA woud detect an unsafe flying condition. The human operator would have a limited time to veto the action before corrective action would be taken by the computer ultimatly perserving the airframe.
Maintaining effective communications is of absolute importance in RPA operations. Without communications an RPA is reduced to becoming a simple drone system, unable to act as an effective team-member. Automation and communications are inextricable linked. As communications increases the effective bandwidth to be utilized decreases. High levels of automation for mundane housekeeping tasks can be completed by the onboard computer reducing communication requirements.
Using RPAs for Search and Rescue (SAR) operations will involve multi-agent communication and interoperability. In the past, a single RPA was controlled from a singe Ground Control Station (GCS) this was referred to as a “stove pipe” communications. Multi-agent Communication and interoperability will enable information that is gathered by the RPA to be shared mutually between multiple users. The North Atlantic Treaty Organization (NATO) has recognized the need for common standards of RPA operations between forces, which led to the development of an RPA control stations Standardization Agreement (STANAG). The agreement was first referred to as STANAG 4586, and it is often called up as a requirement in defence contracts. This agreement has now been adapted to a concept known as Manned-Unmanned Teaming (MUM-T). MUM-T is a method of using the RPA sensors in conjunction with a manned platform in order to deliver additional situation information beyond sensors of the manned platform.[11] The standards outlined in STANAG 4586 have recently been applied to MUM-T. Five Levels of Interoperability (LOI) are described, which range from the RPA control by a third party (LOI 1) up to full control of the system from within a manned platform (LOIs 4 and 5).[12]
Selecting the proper LOI and RPA autonomy level that is required for completion of the mission is key to overall success. Selecting the incorrect LOI may have the side effect of producing undue cognitive demand, surpassing the limits of the operator, leading to mission failure. These concepts will later be applied in the discussion of a SAR scenario in Canada’s north. Ultimately, higher levels of autonomy in RPAs will allow for the potential co-ordination of operations between RPA and crewed airborne platforms.
V. RPA Types and Payload Options
In 2017, hurricane Irma decimated Florida and the eastern United States; this was a modern example of RPAs directly contributing to SAR operations in North America. According to State authorities, RPAs specifically the US Customs and Border Protection Air and Marine Operations flew their MQ-9 Predator B from its home base in Texas to Florida to conduct search, rescue and damage assessments.[13] When discussing a Remotely Piloted Aircraft System (RPAS), he airborne element is often referred to as the platform. The purpose of the platform is to carry the payload that is required for effective mission completion. Payloads are generally defined as the part of the RPA required for a specific mission but the intricacies of payloads will be discussed later in this section. There are multiple types of RPAs, many mimic the design and flight characteristics of conventional aircraft. The following will outline the RPA types to be discussed in this paper.
The employment of different of RPAS depends on the mission that is required to be executed. High Altitude, Long Endurance (HALE) and Medium Altitude, Long Endurance (MALE) systems have an operator range greater than 200 km and exceeding 30,000 feet in altitude. The task of these RPA types is to carry sophisticated payloads such as Synthetic Aperture Radar, Electro-optical / Infrared (EO/IR) sensors, and a wide array of communications equipment (SATCOM, Common Data Link (CDL), INMARSAT). In addition to the large payload carried a substantial amount of fuel must also carried to enable an on-station time of around 24 hours. Examples are the General Atomics MQ-9 Predator B (Reaper), the Northrop Grumman RQ-4 Global Hawk, and the CU170 Heron. The all up mass (AUM) of this class can vary from the 11,636 kg of the Global Hawk to 4,536 kg of the Reaper. HALE / MALE RPAs operate from runways on established bases and can carry heavy payloads over a very long distance.
When slow speeds and closer investigation of an area of interest is required, the most advantageous system to employ is a Rotary-winged RPA. Examples of this type are the Northrop Grumman MQ-8 Fire Scout, the Schiebel Camcopter and the Kaman Unmanned K-MAX. The all up mass of a rotary-winged RPA can range from 1,432 kg of the Northrop Grumman Fire Scout to the 200 kg of the Schiebel Camcopter. Benefits of rotary-wing RPAs come directly from the ability to maneuver in confined areas at low altitudes. Rotary-wing RPAs such as the Kaman Unmanned K-MAX, a joint development by Kaman and Lockheed Martin Rotary Systems, can even present to opportunity to affect a remotely piloted rescue operation. Horizontal Take-off and Landing (HTOL) systems are usually more efficient the VTOL systems but this is offset by the hover ability of VTOL RPAs.
Advancements in technology have resulted in the miniaturization of sensors, which enables small RPAs to carry interchangeable payloads. These payload packages can be EO/IR or even a mini Synthetic Aperture RADAR, depending on the required mission type. Some examples of tactical, mini, or micro RPAs are the Insitu RQ-21 Blackjack, ScanEagle family, the AeroVironment RQ-11 Raven. RCAF Barker Aerospace College in Winnipeg, Manitoba, operates a Bruce Tharpe Engineering Super Hauler RPAS, which in RCAF nomenclature is known as the CU-171 Super Hauler. The CU-171 carries both an EO/IR sensor and a NANO-SAR radar as payload. This class of RPA is best suited for reconnaissance or sustained surveillance. The Insitu ScanEagle 3 with an AUM of 36.3 kg inclusive of a 9.1 kg payload can operate for up to 18 hours.[14] Having defined examples of RPAs that can be used by the RCAF an overview of the purpose of payload will follow.
Without a payload an RPA is likened to a very expensive radio controlled aircraft fund being used at a local model flying club. The requirements for a specific mission will determine what payload is required for successful completion of the mission. In a Search and Rescue mission, in order to initiate a rescue the person must be found. Sensors such as EO/IR, Synthetic Aperture RADAR, Light Detection and Ranging (LiDAR), and Visual Detection and Ranging (ViDAR) can be used as tools to increase search efficiency. It is worth noting that the Airbus C-295 when it comes online, will be the first primary SAR aircraft to have an EO/IR sensor. Size, Weight and Power (SWaP) requirements constrain the overall payload package that an RPA can carry. Generally, payloads can be described as two main types non-dispensable and dispensable.
Non-dispensable payloads are things that remain with the aircraft such as sensors, cameras etc. whereas, dispensable payloads consist of loads that leave the aircraft such as armament or even lifesaving equipment.
The RCAF has a vast area of responsibility, often hindered by low visibility, darkness and thick vegetation. Generally, rescues are not required on Visual Flying Rules (VFR) type days where a visual search is the best way of finding a survivor. Currently in the RCAF, no primary SAR aircraft are fitted with EO/IR sensors although this will change when the Airbus C-295 enters Initial Operating Capability (IOC) with its Wescam MX-15 HD EO/IR sensor in 2019[15]. Considerable advances in miniaturization technology in the past two decades have enabled a plethora of EO/IR options to be available for RPA use. These sensors consist of the following camera types; optical, low-light-level, and thermal imagers. Optical cameras can see the same spectrum of the human eye. Low-light-level cameras (LLL), can provide images as at much as one-tenth of the light necessary for the operation of a normal camera, which is useful for searching in a dark area. Thermal imagers are useful to determine the location of radiating heat, as unlike light which is reflected from objects, heat is omitted by the objects themselves, which is not dependent on illumination. As the air temperature reduces after nightfall, hotter objects are likely to transmit heat more intensely allowing the objects to be found with a thermal imager. A downfall of thermal imagers is that extended rainfall can act to cool all inanimate objects, which reduces the overall contrast of a scene. IR cameras offer a wide field of view allowing the pinpointing of the exact location of a survivor without causing an aircraft to stray from its flight path[16]. In combination with an EO/IR sensor, the miniaturization of Synthetic Aperture RADAR has also reached a point in development that it can also be fitted on a RPA.
Synthetic Aperture RADAR is an all weather, day or night, imaging system that is used to generate high-resolution imagery of the ground from an aerial platform such as an RPA. The aperture of the RADAR refers to the apparatus, or antenna, that receives the electromagnetic (EM) signal. More defined resolution is a function of aperture size. The aperture required for highly defined radar imagery is too big to be physically practical to produce the product that is required. This is generally the bottleneck experienced with RPAs. Synthetic Aperture systems use movement to ‘synthesize’ an aperture much larger than the ‘real aperture’ or physical size of the antenna. This allows Synthetic Aperture RADAR systems to be quite small while still providing high-resolution imagery[17]. Advancements in miniaturization technology have allowed Synthetic Aperture RADAR to be carried onboard tactical, mini, or micro RPAs. One such product is the NANOSAR-C, this RADAR and all accessories can be mounted in either a seven-inch diameter wing-mounted pod or inside the aircraft fuselage. The lightweight of the NANOSAR-C (1.2 kg) and the 25 W power consumption is a relatively tiny footprint that will still allow for the accommodation of supplemental sensor payloads. For example, the CU-171 Super Hauler used at RCAF Barker College carries both a Trillium Orion HD50 EO/IR camera and a NANOSAR-B type RADAR. A technology similar to RADAR that is currently being employed in the field of Geomatics to produce highly detailed terrain mapping is Light Detection and Ranging or LiDAR.
LiDAR was developed shortly aver the first LASERs appeared in 1958. The idea of LiDAR was ahead of its time and required multiple enabling technologies to come to fruition. SWaP restrictions along with costs kept LiDAR from having practical applications on airborne platforms. LiDAR exploits the same basic principles of RADAR and SONAR except light wave pulses are sent out, they bounce off objects, and the return signal is analyzed to determine an objects distance from the source. For airborne topographical use as many as 33,000 laser pulses can be transmitted every second.[18] The RIEGL VUX-1UAV is a lightweight (3.5 kg) and compact laser scanner and is an example of the low SWaP compliant LiDAR systems that are currently being fielded. The VUX-1UAV offers a rotating mirror with a 330-degree field of view (FOV) allowing measurement accuracy to 10mm.[19] This technology is very new in its RPA applications and further research will be able to define its suitability for SAR operations.
An emerging technology that is currently being employed by the Royal Australian Navy (RAN) and the Australian Maritime Safety Authority (AMSA) is ViDAR or Visual Detection and Ranging. ViDAR is a wide area maritime search and surveillance option that can autonomously detect objects on the sea surface. As a payload on the ScanEagle RPA, ViDAR consists of multiple high-resolution digital EO cameras that continuously scan the ocean in a 180-degree arc. Using a software algorithm the on-board automation sends image thumbnails to the sensor operator for further analysis who can use the primary sensor for closer inspection of the object of interest.[20] The US Coast Guard currently uses a ScanEagle RPA equipped with ViDAR and seized of USD $2.1 billion worth of illicit drugs, primarily by the benefits of this technology. These drugs were seized from smugglers using boats equipped with anti-radar capabilities.[21] If this technology can assist with the detection of evasive contacts of interest by the USCG, there are definite SAR applications. The RAN, thru testing claims that a ViDAR equipped ScanEagle RPA can cover an area greater then 13,000 sq. nm of ocean in a 12-hour mission.[22] ViDAR acts as a workaround to a problem with earlier generation EO/IR camera technology, which exhibited a reduced field of view (FOV). This reduced FOV is commonly referred to as “looking through a soda straw”. With ViDAR using a 180-degree arc, the narrow FOV is effectively a non-issue. In addition to the primary sensor payloads discussed thus far, there is a multitude of other non-dispensable payloads that can also be carried onboard an RPA.
A public address system and radio relay carried as a secondary payload onboard an RPA can also have Search and Rescue (SAR) applications. A public address system, consisting of a loudspeaker and TV camera can be used to communicate with the survivor, if no ground radio is available. The use of a radio relay system can be utilized for extending the communications ranges by the repetition of communications signals from one platform to another. A majority of RPA platforms such as the Reaper, ScanEagle, and Fire Scout are equipped with a communications relay feature. The use of multiple relays can be used to controlling another RPA from outside normal communications range. One of the methods of executing a long-range relay is through the use of a dynamic communication chain. A dynamic communications chain provides a link by utilizing multiple RPAs autonomously maintaining a swarm formation; this method offers flexibility in changing situations.[23] Figure 2 displays an example of an RPA communications chain relay set-up. This communication chain relay method could be utilized to combat communications issues in Canada’s north until the Enhanced Satellite Communications Project – Polar provides access to wideband and low-capacity UHF narrowband SATCOM and MILSATCOM capability in Canada’s northern latitudes of 65°N – 90°N, as this project is not entering IOC till between 2028 – 2029.[24]
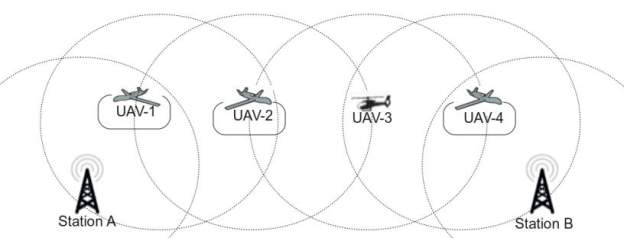
Figure 2 – RPA Communication Chain Relay Representation[25]
Dispensable payloads can offer the opportunity to deliver immediate life saving equipment to a casualty that is located by an RPA in SAR mission. Dispensable payloads can range in size from as large as a Survival Kit Air Droppable (SKAD) to material as small as a SATCOM radio or life preserver; the possibilities of non-dispensable payloads are only limited by the size of the RPA platform. This first response equipment can dramatically impact a casualties survival prospects. National Research Council (NRC) Survival studies claim that the chance of survival statistically decreases by about 3 percent for every hour that passes after an incident occurs.[26]
RPAs can act as a force multiplier to augment the sensors on the crewed fixed or rotary-wing aircraft, by allowing for the employment of various payload types that can be customized to the SAR mission being conducted. Combined with the manned-unmanned teaming concepts discussed in the previous section, SAR missions can be conducted to a higher effectiveness. As newer, more efficient, and lighter payloads are developed payload customization reduces the requirement for a new platform. This reduced requirement to certify and develop entirely new aircraft and / or control station allowing for a reduction in overall expenses and timelines in the fielding new technologies. Now that the technologies involved have been discussed, this paper will now discuss how RPAs can be utilized in the northern context.
VI. Northern Applications
The increase in polar traffic underscores the importance of SAR in the Arctic. Climate change has opened Canada’s north to increased interest from many parties including various commercial and state interests. In 2007, Russia planted a titanium capsule containing a Russian flag on the sea floor under the North Pole, as a claim over the polar region’s oil and minerals[27]. In order to exercise northern sovereignty, the Government of Canada must first have a robust SAR capability[28]. Increased presence in the Arctic due to development in research programs, eco-tourism and trans-national ship movements highlights the need for a high readiness northern SAR capability. According to statistics provided by Nav Canada, polar flights are steadily increasing from 800 flights in 2003 to just fewer than 16,000 flights in 2016.[29] This increase is due to the potential time and fuel savings offered by airline carriers using polar routes for example “a flight from JFK Airport to Hong Kong can save up to 2 hours flying time, or 16,000 litres of fuel, by using polar routes.”[30] The increase in polar traffic has the potential to create significant additional pressure on the SAR system.
In the 2013 evaluation of the National SAR Program, the incident rates of SAR activities in the latitudes north of 60°N were 5% of all air SAR incidents in Canada. Although this number is small, northern SAR missions are risky. There is a significant transit distance and limited communities offering an equally small amount of refuelling opportunities, which severely inhibits rotary-wing aircraft response[31]. The only way, to effectively pick up and rescue a survivor is using a rotary-wing aircraft, as fixed-wing aircraft can only deliver first aid the deployment of SAR technicians or first aid equipment. A paradox is created when the National SAR system is analyzed when the context of Arctic SAR is used. The majority of rescue assets are located in the south where the higher population and majority of incidents take place. The Arctic results in having the slowest response time of SAR aircraft, whereas in reality the fastest response time would be required due to the extreme environmental conditions.
The following in a fictional scenario using a luxury cruise ship known as Le Soleal carrying approximately 250 people on a cruise through the Northwest Passage (NWP). The utilization in the Arctic of a MALE/HALE RPA for example a MQ-9 Predator B would monitor the AOR and track the vessel on its entrance into the NWP. The MALE/HALE RPA (MQ-9 Predator B) would remain on station for up to 24 hours and be launched from Inuvik.
Day 1 0400L – Joint Task Force North (JTFN) receives information that Le Soleal is approaching the Canadian AOR in the Beaufort Sea.
0600L – The MQ-9 Reaper launches from Inuvik, NWT.
0700L – The RPA is ON-STATION conducing a sensor sweep in the AOR.
1000L – RPA Crew change in GCS (every 4 hrs. to keep situational awareness of crews).
2300L – Relief RPA launched from Inuvik, NWT.
Day 2 0000L – RPA crews conduct handover on station.
0030L – Relieved RPA Returns to base (RTB).
0200L – A weak distress signal (MAYDAY) is received on VHF-FM channel 16 from Le Soleal by the RPA and this information is passed to Rescue Coordination Centre Trenton via landline from the RPA mission commander. COSPASS-SARSAT beacon hit on 406 MHz, the Canadian Mission Control Centre (CMCC) located in Trenton, Ontario receives and confirms the locator beacon distress signal from the international COSPAS-SARSAT system.[32]
0230L – HMCS Margaret Brooke a Royal Canadian Navy Arctic Offshore Patrol Ship (AOPS) operating in the NWP alters course to last known position of Le Soleal with a 3.5 hr. ETA and prepares to launch embarked CH-148 Cyclone helicopter.
0245L – RPA arrives at last known position of Le Soleal and is unable to locate any contacts immediately commences expanding square search using EO/IR with a 1 nm spacing.
0300L – RPA payload operator initially picks up an oil slick and debris from the last known position of the vessel. Upon closer investigation a group of six or seven potential survivors wearing survival suits is detected. The EO/IR feed from the RPA is now being sent to the airborne CH-148 Cyclone and the EO/IR ball on the MQ-9B Protector can now be controlled by the sensor operator on the CH-148.
0400L – The CH-148 is ON-STATION and hands back EO/IR control to the RPA GCS payload operator, who continues the search. The CH-148 launches an Air-Launched, Tube-Integrated Unmanned System (ALTIUS)[33] RPA and passes control of the ALTIUS RPA to a sensor operator on the HMCS Margaret Brooke, controls the ALTIUS RPA and continues the search. The Cyclone conducts wet hoisting operations to rescue the seven survivors.
0500L – The CH-148 returns the survivors to the HMCS Margaret Brooke and prepares to launch for further SAR operations.
There are many iterations of how this concept could be performed, as this is only just a single example scenario of how the RCAF could deal with a major maritime disaster in the NWP. Similarities in actions could also parallel to rescue planning in the event of a Major Aeronautical Disaster (MAJAID). A MAJAID could occur in Canada’s north due to the increased use of polar routes by commercial aviation. Due to the extensive SAR AOR, transit time is a significant portion of the overall time that is required to arrive at the scene of the incident or last known position of the victim. The average transit time for air or maritime SAR missions can range from two to eight hours, depending on the location of the incident, and the base of the responding aircraft, before any searching begin. The previous figure is much longer for searches in the north and response time is dependent on the pre-positioning of SAR aircraft. Technological improvements such as the expanded use of distress beacons, GPS and other communications technology are reducing search time, but response time to northern areas remains the major limiting factor.[34]
VII. Supplementary Options
Search and Rescue (SAR) span multiple domains; space, air, land and sea, which allows for a number of supplementary options to increase the robustness of the National Search and Rescue Program (NSP). The options of increasing SAR aircraft and personal to provide more thorough coverage of Canada’s AOR as well as the use of CASARA and satellite based Synthetic Aperture RADAR will be discussed as ways to supplement the NSP.
A 2015, evaluation of the RCAF contribution to the NSP found that the overall cost of the RCAF contribution has increased significantly over the past few years specifically due to the operating costs per hour of the aircraft involved (Table 2). The CH-146 Griffon a secondary SAR asset is being uses as a less capable (compared to the CH-149 Cormorant) stopgap capability at present in CFB Trenton. Retention and force generation of qualified crews is a problem the RCAF is experiencing as a whole. SAR squadrons according to RCAF data are properly manned but there is a shortage of qualified Aircraft Commanders limiting the training of First Officers.[35] The use of RPAs would draw from personnel that are not currently engaged in SAR squadrons such as Airborne Electronic Sensor Operators (AES Op), and utilize grounded aircrew that could be potentially unfit for flying duties. Promptly increasing crewed SAR aircraft and manning requirements would act to exacerbate the personnel problems the RCAF is currently experiencing.
| Costs of SAR Aircraft | ||
| SAR Aircraft | Operating Costs per Hour |
Full Costs per Hour |
| CC115 – Buffalo | $3,950 | $30,500 |
| CC130 – Hercules | $6,500 | $43,950 |
| CH146 – Griffon | $1,450 | $19,600 |
| CH149 – Cormorant | $6,650 | $36,350 |
| CASARA Aircraft | $757 | $18,767 |
Table 2 – Costs of SAR Aircraft[36]
CASARA is a nationwide, 1,800-member strong, volunteer organization that is annually funded $3.2 million dollars by the Department of National Defence (DND).[37] CASARA provides light fixed wing aircraft such as the Cessna C-172 Skyhawk for various tasking’s such as basic electronic homing. CASARA also provides trained visual spotters to RCAF aircraft, as required. Although CASARA aircraft do not have the ability to drop rescue equipment or SAR technicians they are able to detect emergency locator transmitter signals reducing search times and greatly reducing false alarms. The 2015, evaluation of RCAF SAR contribution recommended that the use of CASARA should be maximized on low probability events such as un-correlated 121.5 MHz beacon alerts. If 200 hours were reallocated to CASARA vice used on force employment on the SAR aircraft fleet upwards of $6 million dollars could be saved.[38] Unfortunately being a volunteer organization is a positive and a negative at the same time as volunteers keep costs organizational growth could be a concern.
The last supplementary option that will be discussed is the increased use of space-based assets to reduce search times. Defence Research and Development (DRDC) has been researching using space-based Synthetic Aperture RADAR to reduce search times when the Emergency Locator Beacon has not been activated. DRDC found that although the imagery has potential usefulness in searches when the crash areas are not obscured by vegetation such as in Canada’s arctic. This satellite-based technology can produce a high number of false detections and must rely on previously obtained optical images to reduce false potential crash sites that are produced by backscatter.[39] As the previous study was conducted with RADARSAT-2, the further research will have to be conduced when the RADARSAT Constellation Mission (RCM) launches in November 2018. The RCM consists of 3 satellites each carrying a Synthetic Aperture RADAR and Automated Identification System (AIS) that can provide coverage of the NWP every 10 hours this will also greatly increase Canada’s maritime and northern surveillance coverage.[40]
Of the three supplementary options discussed, the applications of the RCM look to be the most promising, as it would potentially not take personnel from active SAR Squadrons and is already and investment that is on the books. Increasing the size of SAR Squadrons with more aircrew and aircraft may further increase problems related to qualified aircrew and technicians.
VIII. Conclusion
The Canadian SAR Area of responsibility (AOR) stretches over 18 million square kilometers from 1,500 km west of Vancouver Island to the North Pole and halfway across the Atlantic Ocean. This large AOR is complicated by a varied population distribution. In Canada, the majority of the population is concentrated the southern areas leaving most of Canada’s north sparsely populated causing a complication for the positioning of SAR aircraft.
Strong, Secure, Engaged, released in 2017 as Canada’s new defence policy, lists SAR as a core mission of the CAF. The acquisition of Remotely Piloted Aircraft (RPA) is described as a future investment for the RCAF. This technology has a long history of research and development in Canada. RPAs have been deployed on various CAF/RCAF operations in the past and can offer numerous advantages, such as their ability to stay airborne longer, provide flexible payload options, and cover a range of missions from ISR to Search and Rescue.
There are multiple types of RPAs; many mimic the design and flight characteristics of conventional aircraft. As no current primary SAR aircraft carries an EO/IR sensor, the Airbus C-295 will be the first primary SAR aircraft to employ one, this capability can be provided by RPAs. Advancements in technology have resulted in the miniaturization of sensors, which enables small RPAs to carry interchangeable payloads such as EO/IR, Synthetic Aperture RADAR, Light Detection and Ranging (LiDAR), and Visual Detection and Ranging (ViDAR) to increase search efficiency.
Secondary payloads carried by RPAs also be used have applications on SAR missions. Non-dispensable payloads such as a public address system can allow communications with the survivor. Other secondary payloads, for example radio relay systems can use RPAs to extend communications ranges by setting up a dynamic communications chain utilizing multiple RPAs. Dispensable payloads can offer the opportunity to deliver immediate lifesaving equipment to a casualty. Depending on the size of the RPA the dispensable payload range from the size of a survival radio to a Survival Kit Air Droppable (SKAD). RPAs can act as a force multiplier to augment the sensors on the crewed fixed or rotary-wing aircraft, by allowing for the employment of various payload types that can be customized to the SAR mission being conducted.
Increasing polar traffic (Air and Marine) due to climate change has refocused the importance of SAR in the arctic. In order to exercise northern sovereignty, the Government of Canada must first have a robust SAR capability. Northern SAR missions are risky. There is a significant transit distance and limited communities offering an equally small amount of refuelling opportunities, which severely inhibits rotary-wing aircraft response. Technological improvements such as the expanded use of distress beacons, GPS and other communications technology are reducing search time, but response time to northern areas remains the major limiting factor.
As SAR operations span multiple domains, other options were discussed including increasing SAR aircraft and personnel to provide more thorough coverage of Canada’s AOR as well as the use of CASARA and satellite based Synthetic Aperture RADAR. As qualified aircrews at SAR Squadrons are a limiting factor the use of RPAs is a remedy to employ medically grounded aircrew in SAR operations. CASARA is a very valuable tool, but is hard to increase due to the volunteer nature of the organization. Space-based ISR platforms such as the RCM look promising to add another tool to the SAR toolbox in the future.
IX. Recommendation
As there is no silver bullet in improving how the RCAF contributes to the NSP. An investment in RPA technology will ensure that limited-resources are not miss-allocated. The use of RPAs by the RCAF will act to increase the effectiveness of current and future SAR operations in Canada. RPAs offer reconfigurable payload that is reduced the hardships in ensuring that the most modern technology is fielded, by restricting crewed platforms for use only when required, reducing manpower strains.
As SAR is one of the missions that the RCAF undertakes that is very visible to the public, failure is not an option. Strong, Secure, Engaged, lists SAR as a core mission of the CAF and the acquisition of RPAs as a fully funded priority. Proper SAR needs the right tools to execute the mission of saving lives “That others may live”.
Bibliography
“About CASARA |.” Accessed June 7, 2018. https://www.casara.ca/about-casara/.
Arbour, Benoit, Matthew R. MacLeod, and Sean Bourdon. “Toward Defining Canadian Manned-Unmanned Teaming (MUM-T) Concepts,” 2015.
“ARCHIVED – Quadrennial Search and Rescue Review – Report,” March 24, 2016. https://www.publicsafety.gc.ca/cnt/rsrcs/pblctns/archive-nss-qdrnnl-rvw/index-en.aspx.
Assistant Deputy Minister (Review Services), National Defence and the Canadian Armed Forces. “Evaluation of the DND/CAF Contribution to the National Search and Rescue Program,” January 13, 2011.
Aug 02, CBC News · Posted:, 2007 12:05 PM ET | Last Updated: August 2, and 2007. “Russia Plants Flag Staking Claim to Arctic Region | CBC News.” CBC, August 2, 2007. http://www.cbc.ca/news/world/russia-plants-flag-staking-claim-to-arctic-region-1.679445.
Austin, Reg. Unmanned Aircraft Systems : UAVS Design, Development and Deployment. Aerospace Series. Chichester: Wiley, 2010. http://uml.idm.oclc.org/login?url=http://search.ebscohost.com/login.aspx?direct=true&db=nlebk&AN=319175&site=ehost-live.
“Autonomy | Definition of Autonomy in English by Oxford Dictionaries.” Oxford Dictionaries | English. Accessed April 21, 2018. https://en.oxforddictionaries.com/definition/autonomy.
Carryer, Andrew, and MacDonald Dettwiler & Associates. A History of Unmanned Aviation in Canada. Richmond, BC: MacDonald, Dettwiler and Associates Ltd., 2008. http://epe.lac-bac.gc.ca/100/200/300/macdonald_dettwiler/history_uav.pdf.
Cetin, Omer, and Ibrahim Zagli. “Continuous Airborne Communication Relay Approach Using Unmanned Aerial Vehicles,” n.d., 17.
“Cospas-Sarsat System – International COSPAS-SARSAT.” Accessed April 22, 2018. https://cospas-sarsat.int/en/system-overview/cospas-sarsat-system.
Cummings, M. L., C. Mastracchio, K. M. Thornburg, and A. Mkrtchyan. “Boredom and Distraction in Multiple Unmanned Vehicle Supervisory Control.” Interacting with Computers 25, no. 1 (January 1, 2013): 34–47. https://doi.org/10.1093/iwc/iws011.
Cummings, M.L., and P.J. Mitchell. “Operator Scheduling Strategies in Supervisory Control of Multiple UAVs.” Aerospace Science and Technology 11, no. 4 (May 2007): 339–48. https://doi.org/10.1016/j.ast.2006.10.007.
Government of Canada, Canadian Space Agency. “RADARSAT Constellation.” Canadian Space Agency website, February 18, 2011. http://www.asc-csa.gc.ca/eng/satellites/radarsat/Default.asp.
Government of Canada, National Defence. “Enhanced Satellite Communication Project – Polar – Defence Capabilities Blueprint,” May 31, 2017. http://dgpaapp.forces.gc.ca/en/defence-capabilities-blueprint/project-details.asp?id=1279.
———. “Search and Rescue | Royal Canadian Air Force,” April 11, 2013. http://www.rcaf-arc.forces.gc.ca/en/search-rescue.page.
Government of Canada, Public Services and Procurement Canada. “Fixed-Wing Search and Rescue Aircraft Replacement Project – Defence Procurement – Buying and Selling – PSPC,” June 4, 2012. https://www.tpsgc-pwgsc.gc.ca/app-acq/amd-dp/air/arsvf-fwsar/index-eng.html.
Insitu. “ScanEagle 3,” 2018. https://www.insitu.com/images/uploads/pdfs/2018_ScanEagle3_Subfolder_051618_lowres.pdf.
Judson, Jen. “US Army to Launch Drone from Helicopter for First Time This Year.” Defense News, May 2, 2018. http://www.defensenews.com/digital-show-dailies/aaaa/2018/05/01/army-to-launch-drone-from-helicopter-for-first-time-this-year/.
Lukowski, T. I., J. Secker, and M. Ghazel. “Synthetic Aperture Radar and Search and Rescue: Studies in the Canadian North.” In 2012 13th International Radar Symposium, 435–38, 2012. https://doi.org/10.1109/IRS.2012.6233360.
Ouellette, Jennifer. “L Is for LIDAR.” Scientific American Blog Network. Accessed May 9, 2018. https://blogs.scientificamerican.com/cocktail-party-physics/l-is-for-lidar/.
Patterson, Thom. “Drones Are More Helpful than Ever in Hurricane-Ravaged Texas and Florida.” CNNMoney, September 23, 2017. http://money.cnn.com/2017/09/23/technology/hurricanes-drones/index.html.
Paul, Tobias, and Emanuel Brämer. “Operational Considerations for Teaming Manned and Unmanned Helicopter.” Journal of Intelligent & Robotic Systems 69, no. 1–4 (January 2013): 33–40. https://doi.org/10.1007/s10846-012-9715-4.
Perry, A.M.J. “Canada’s Northern Strategy – A Search and Rescue Challenge or an Opportunity?” Canadian Forces College, 2014.
Poitras, D. “Search And Rescue In The Arctic: A Myth Or A Reality?” Canadian Forces College, 2013.
“Polar Routes – Past, Present and Future.” NAV CANADA Blog, April 27, 2017. http://blog.navcanada.ca/polar-routes-past-present-future/.
“Proving the Rescue Potential of Multi-Sensor UAVs.” Accessed May 26, 2018. https://www.gim-international.com/content/article/proving-the-rescue-potential-of-multi-sensor-uavs.
“Sentient’s ViDAR Shows Success during USCG ScanEagle Demonstrations | Jane’s 360.” Accessed April 19, 2018. http://www.janes.com/article/79300/sentient-s-vidar-shows-success-during-uscg-scaneagle-demonstrations.
Strong Secure Engaged: Canada’s Defence Policy., 2017. http://www.deslibris.ca/ID/10090905.
“SYNTHETIC APERTURE RADAR.” IMSAR (blog). Accessed May 26, 2018. https://www.imsar.com/index.php/portfolio-posts/synthetic-aperture-radar/.
“ViDAR.” Sentient Vision Systems (blog). Accessed April 17, 2018. http://www.sentientvision.com/products/vidar/.
“We Are NAV CANADA: Annual Report 2017.” Ottawa, 2017. http://www.navcanada.ca/EN/media/Publications/Annual%20Report%202017-EN.pdf.
Yeo, Mike. “THE ADF’S USE OF UNMANNED AERIAL SYSTEMS SET TO GROW.” Asia Pacific Defence Reporter 42, no. 10 (December 2016): 32–35.
Zappier, Alicia. “IR Video Helps Coast Guard Search and Recue Efforts.” Goverment Video 15, no. 5 (April 2004): 10.
[1] “ARCHIVED – Quadrennial Search and Rescue Review – Report,” March 24, 2016, https://www.publicsafety.gc.ca/cnt/rsrcs/pblctns/archive-nss-qdrnnl-rvw/index-en.aspx.
[2] National Defence and the Canadian Armed Forces Assistant Deputy Minister (Review Services), “Evaluation of the DND/CAF Contribution to the National Search and Rescue Program,” January 13, 2011.
[3] “ARCHIVED – Quadrennial Search and Rescue Review – Report.”
[4] National Defence Government of Canada, “Search and Rescue | Royal Canadian Air Force,” April 11, 2013, http://www.rcaf-arc.forces.gc.ca/en/search-rescue.page.
[5] Strong Secure Engaged: Canada’s Defence Policy., 2017, http://www.deslibris.ca/ID/10090905.
[6] Andrew Carryer and MacDonald Dettwiler & Associates, A History of Unmanned Aviation in Canada. (Richmond, BC: MacDonald, Dettwiler and Associates Ltd., 2008), http://epe.lac-bac.gc.ca/100/200/300/macdonald_dettwiler/history_uav.pdf.
[7] “Autonomy | Definition of Autonomy in English by Oxford Dictionaries,” Oxford Dictionaries | English, accessed April 21, 2018, https://en.oxforddictionaries.com/definition/autonomy.
[8] Reg Austin, Unmanned Aircraft Systems : UAVS Design, Development and Deployment, Aerospace Series (Chichester: Wiley, 2010): 300
[9] M. L. Cummings et al., “Boredom and Distraction in Multiple Unmanned Vehicle Supervisory Control,” Interacting with Computers 25, no. 1 (January 1, 2013): 44
[10] M.L. Cummings and P.J. Mitchell, “Operator Scheduling Strategies in Supervisory Control of Multiple UAVs,” Aerospace Science and Technology 11, no. 4 (May 2007): 340
[11] Tobias Paul and Emanuel Brämer, “Operational Considerations for Teaming Manned and Unmanned Helicopter,” Journal of Intelligent & Robotic Systems 69, no. 1–4 (January 2013): 33, https://doi.org/10.1007/s10846-012-9715-4.
[12] Benoit Arbour, Matthew R. MacLeod, and Sean Bourdon, “Toward Defining Canadian Manned-Unmanned Teaming (MUM-T) Concepts,” 2015, 2
[13] Thom Patterson, “Drones Are More Helpful than Ever in Hurricane-Ravaged Texas and Florida,” CNNMoney, September 23, 2017, http://money.cnn.com/2017/09/23/technology/hurricanes-drones/index.html.
[14] Insitu, “ScanEagle 3,” 2018, https://www.insitu.com/images/uploads/pdfs/2018_ScanEagle3_Subfolder_051618_lowres.pdf.
[15] Public Services and Procurement Canada Government of Canada, “Fixed-Wing Search and Rescue Aircraft Replacement Project – Defence Procurement – Buying and Selling – PSPC,” June 4, 2012, https://www.tpsgc-pwgsc.gc.ca/app-acq/amd-dp/air/arsvf-fwsar/index-eng.html.
[16] Alicia Zappier, “IR Video Helps Coast Guard Search and Recue Efforts,” Goverment Video 15, no. 5 (April 2004): 10.
[17] “SYNTHETIC APERTURE RADAR,” IMSAR (blog), accessed May 26, 2018, https://www.imsar.com/index.php/portfolio-posts/synthetic-aperture-radar/.
[18] Jennifer Ouellette, “L Is for LIDAR,” Scientific American Blog Network, accessed May 9, 2018, https://blogs.scientificamerican.com/cocktail-party-physics/l-is-for-lidar/.
[19] “Proving the Rescue Potential of Multi-Sensor UAVs,” accessed May 26, 2018, https://www.gim-international.com/content/article/proving-the-rescue-potential-of-multi-sensor-uavs.
[20] “ViDAR,” Sentient Vision Systems (blog), accessed April 17, 2018, http://www.sentientvision.com/products/vidar/.
[21] “Sentient’s ViDAR Shows Success during USCG ScanEagle Demonstrations | Jane’s 360,” accessed April 19, 2018, http://www.janes.com/article/79300/sentient-s-vidar-shows-success-during-uscg-scaneagle-demonstrations.
[22] Mike Yeo, “THE ADF’S USE OF UNMANNED AERIAL SYSTEMS SET TO GROW,” Asia Pacific Defence Reporter 42, no. 10 (December 2016): 35.
[23] Omer Cetin and Ibrahim Zagli, “Continuous Airborne Communication Relay Approach Using Unmanned Aerial Vehicles,” n.d.: 2.
[24] National Defence Government of Canada, “Enhanced Satellite Communication Project – Polar – Defence Capabilities Blueprint,” May 31, 2017, http://dgpaapp.forces.gc.ca/en/defence-capabilities-blueprint/project-details.asp?id=1279.
[25] Cetin and Zagli, “Continuous Airborne Communication Relay Approach Using Unmanned Aerial Vehicles.”
[26] D Poitras, “Search And Rescue In The Arctic: A Myth Or A Reality?” (Canadian Forces College, 2013): 28.
[27] CBC News · Posted: Aug 02, 2007 12:05 PM ET | Last Updated: August 2, and 2007, “Russia Plants Flag Staking Claim to Arctic Region | CBC News,” CBC, August 2, 2007, http://www.cbc.ca/news/world/russia-plants-flag-staking-claim-to-arctic-region-1.679445.
[28] A.M.J Perry, “Canada’s Northern Strategy – A Search and Rescue Challenge or an Opportunity?” (Canadian Forces College, 2014): 3
[29] “We Are NAV CANADA: Annual Report 2017” (Ottawa, 2017), 3
[30] “Polar Routes – Past, Present and Future,” NAV CANADA Blog, April 27, 2017, http://blog.navcanada.ca/polar-routes-past-present-future/.
[31] Assistant Deputy Minister (Review Services), “Evaluation of the DND/CAF Contribution to the National Search and Rescue Program.”
[32] “Cospas-Sarsat System – International COSPAS-SARSAT,” accessed April 22, 2018, https://cospas-sarsat.int/en/system-overview/cospas-sarsat-system.
[33] Jen Judson, “US Army to Launch Drone from Helicopter for First Time This Year,” Defense News, May 2, 2018, http://www.defensenews.com/digital-show-dailies/aaaa/2018/05/01/army-to-launch-drone-from-helicopter-for-first-time-this-year/.
[34] Assistant Deputy Minister (Review Services), “Evaluation of the DND/CAF Contribution to the National Search and Rescue Program.”
[35] Assistant Deputy Minister (Review Services).
[36] Assistant Deputy Minister (Review Services).
[37] “About CASARA” accessed June 7, 2018, https://www.casara.ca/about-casara/.
[38] Assistant Deputy Minister (Review Services), “Evaluation of the DND/CAF Contribution to the National Search and Rescue Program.”
[39] T. I. Lukowski, J. Secker, and M. Ghazel, “Synthetic Aperture Radar and Search and Rescue: Studies in the Canadian North,” in 2012 13th International Radar Symposium, 2012, 435–38: 438.
[40] Canadian Space Agency Government of Canada, “RADARSAT Constellation,” Canadian Space Agency website, February 18, 2011, http://www.asc-csa.gc.ca/eng/satellites/radarsat/Default.asp.
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


Related Content
All TagsContent relating to: "Aviation"
Aviation regards any activity involved in the aircraft industry or mechanical flight including flying and the design, manufacture, and maintenance of aircraft. The term “aircraft” includes such vehicles as aeroplanes, helicopters, and lighter than air craft such as hot air balloons and airships.
Related Articles

DMCA / Removal Request
If you are the original writer of this dissertation and no longer wish to have your work published on the UKDiss.com website then please: