Solar Tracking Systems for Energy Generation
Info: 8808 words (35 pages) Dissertation
Published: 10th Dec 2019
Tagged: EnergySustainability
CHAPTER 1
INTRODUCTION, LITERATURE REVIEW AND OBJECTIVES
1.1 INTRODUCTION TO SOLAR PANELS
A solar cell, or photovoltaic cell, is an electrical device that converts the energy of light directly into electricity by the photovoltaic effect, which is a physical and chemical phenomenon. It is a form of photoelectric cell, defined as a device whose electrical characteristics, such as current, voltage, or resistance, vary when exposed to light. Solar cells are the building blocks of photovoltaic modules. A solar panel is a collection of solar cells. Lots of small solar cells spread over a large area can work together to provide enough power to be useful. The more light that hits a cell, the more electricity it produces. There are more than a dozen of types of solar panel i.e. Monocrystalline solar cell, Polycrystalline solar cell, Thin-film solar cell etc.
Photovoltaic cells are made of special materials called semiconductors such as silicon, which is currently used most commonly. Basically, when light strikes the cell, a certain portion of it is absorbed by the semiconductor material. This means that the energy of the absorbed light is transferred to the semiconductor. The energy knocks electrons loose, allowing them to flow freely.
1.2 SOLAR POWER GENERATION
The Two Types of Solar Energy, Photovoltaic, and Thermal. Photovoltaic technology directly converts sunlight into electricity. The solar thermal technology harnesses its heat. These different technologies both tap the Sun’s energy, locally and in large-scale solar farms.
In the case of Photovoltaic Cells Photons in sunlight hit the solar panel and are absorbed by semiconducting materials, such as silicon. Electrons are excited from their current molecular/atomic orbital. Once excited an electron can either dissipate the energy as heat and return to its orbital or travel through the cell until it reaches an electrode. Current flows through the material to cancel the potential and this electricity is captured. The chemical bonds of the material are vital for this process to work, and usually, silicon is used in two layers, one layer being bonded with boron, the other phosphorus. These layers have different chemical electric charges and subsequently both drive and direct the current of electrons. An array of solar cells converts solar energy into a usable amount of direct current (DC) electricity. In contrast, a solar thermal collector supplies heat by absorbing sunlight, for the purpose of either direct heating or indirect electrical power generation from heat.
1.3 SOLAR TRACKING SYSTEMS
Solar panels absorb sunlight and convert it into electricity that we can use. Every second, the sun sends about 42 trillion kilocalories of energy to the Earth. If we could convert 100% of this solar energy into electricity, we could create one year’s worth of power for the entire planet in a single hour. Solar energy is the most powerful of all renewable energy resources. No conventional solar generation system can achieve maximum efficiency. The only negligible fraction of solar energy is being converted as of now.
Solar tracking system drastically increases the amount of production from the same panel. It basically tracks the sun all day through and faces the direction where sun’s rays are perpendicular to the plate. There are basically two types of solar tracking systems as per construction and degree of freedom. (i) Single Axis Solar Tracking system and (ii) Dual Axis Solar Tracking System.
1.3.1 Single Axis Solar Tracking Systems
A Single axis tracking system is a method where the solar panel tracks the sun from east to west using a single pivot point to rotate. Under this system, there are three types: Horizontal single axis tracking system, Vertical single-axis tracking system and Tilted single axis tracking system. In the Horizontal system, the axis of rotations horizontal with respect to the ground and the face of the module is oriented parallel to the axis of rotation. In the Vertical system, the axis of rotation is vertical with respect to the ground and the face of the module disoriented at an angle with respect to the axis of rotation.
1.3.2 Dual Axis Solar Tracking System
Dual axis solar trackers have both a horizontal and a vertical axis and thus they can track the sun’s apparent motion virtually anywhere in the sky no matter where it is positioned on earth, as a result it is more efficient.
1.4 ADVANTAGES AND DISADVANTAGES OF SOLAR TRACKING SYSTEMS
1.4.1 Advantages
The very first advantage is the efficiency of solar power production can be increased as it mentioned earlier. To get the even more efficient system the power consumption to operate the can be reduced.
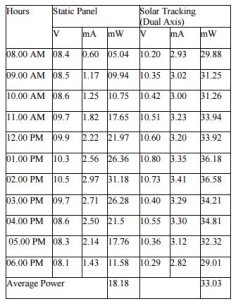
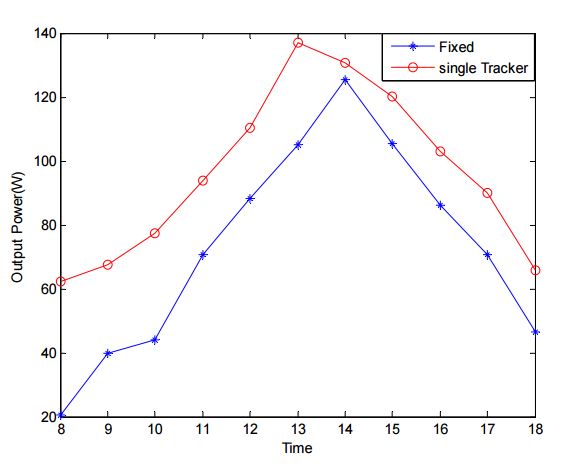
Figure 2. Efficiency of Dual Axis Tracking System over static panel, and comparison
between the Single tracker and fixed panel [01].
Here its result from an experiment, comparing static panel output (18.18 mW), SASTS and DASTS were (24.03 mW) and (33.03 mW) respectively. Single axis solar tracking is 35% more efficient than conventional static panel where dual axis solar tracking system is 81 %. So, by reducing the power consumption we can increase the efficiency.
The land required for a 1 MW power plant setup is around 4.5-5 acres of crystalline technology and around 6.5-7.5 acres of Thin-Film technology. This area is not an issue if the plant is located at the remote place but by increasing the production from the same amount of area we can increase production density of a plant. So basically, for producing same amount energy we need less space. And the production facility can be near the city. The transportation can be saved.
1.4.2 Disadvantages
The only disadvantage is to operate SASTS and DASTS we need a motor. To keep updating the location of the panel it needs to be powered continuously. Operation of the system requires power. So, by reducing the operation power we can gain efficiency.
1.5 LITERATURE REVIEW
Energy is a quintessential part of human life. Day by day the demand for energy is increasing. We have been using nonrenewable energy from the beginning but due to limited resources, we must look for the alternatives. Alternatives such as sunlight, wind, rain, tides, waves, and geothermal heat. The Earth receives 174 petawatts (PW) of incoming solar radiation at the upper atmosphere. But we can not utilize it more than a fraction of the total.
We use solar panels to generate electricity from sun’s thermal energy. After a certain period, the panel becomes less productive because it does not have sunlight directly on the surface. To overcome this problem, the panel should be facing sun always. A solar tracker is a mechanism that tracks the some by a various mechanism. Solar tracker makes the plate face the sun throughout the day in that way we can generate more energy from the same size of a plate.
Dhanabal.R developed a dual axis solar tracking mechanism. Duel axis provides two degrees of freedom. The readings for both the static panel and dual-axis tracker are taken for from morning 8 am to evening 6 pm for every hour. According to the measured readings, the efficiency of the dual axis tracker is found to be 81.68% higher than that of fixed panel whereas the efficiency of the single axis tracker is only 32.17% higher than that of fixed panel.
Gagari Deb did observe previous research and developed a design and executed a solar tracker system dedicated to the PV conversion panels. The proposed single axis solar tracker device ensures the optimization of the conversion of solar energy into electricity by properly orienting the PV panel in accordance with the real position of the sun. The operation of the experimental model of the device is based on a Stepper motor intelligently controlled by a dedicated drive unit that moves a mini PV panel according to the signals received from two simple but efficient light sensors. In this paper mechanism of building an efficient solar tracking system with the help of LabVIEW software is discussed, and discussed the control strategy of the stepper motor. From the study, it is found that the motor will move the solar array according to the light intensity of the sun.
Qi-Xun Zhang designed and tested a novel solar tracking generation system. The system was developed after taking into consideration the geography, climate, and other environmental factors of northeast China. The experimental results indicated that compared to the power generated by fixed solar panels, the solar tracking system generated about 20% to 25% more power. In addition, the performance of this novel power generating system was found to be closely associated with solar irradiance.
J. Rizk worked on solar tracker design for employing the new principle of using small solar cells to function as self-adjusting light sensors, providing a variable indicative of their relative angle to the sun by detecting their voltage output. By using this method, the solar tracker was successful in maintaining a solar array at a sufficiently perpendicular angle to the sun. The power increase gained over a fixed horizontal array was in excess of 30%.
S. Ghodke’s paper shows the potential benefits of the solar tracking system by using real-time clock and microcontroller. This method is developing the systems that increase the efficiency of the system that tracks the sun rays into its right angle. The solar tracking system is designed and experimentally tested. He took 180° as total sun trajectory angle and 12 hours as active tracking time and therefore panel needs to rotate 15° per hour. From the results, it can be seen that the tracking system gives maximum power output between 9 A.M. to 5 P.M. Where on the other hand the maximum output from conventional panels only in the span of 12 pm to 4 pm. So, it can be concluded that the tracking system is better energy efficient solar system than fixed panel system.
Looking at current scenario in solar power generation, the majority of the plants and individuals use conventional panels. Which is economical to set up but it’s not fully efficient throughout the whole day. To maximize the efficiency solar tracker is the helpful way.
Tracking sun is not same in every geographical and weather condition. So, having fix sector of rotation is not the best way all the time. The intensity of sunlight, direction, angle, and accessibility are various factors that we should take it into consideration. That’s where XYZ mechanism helps. Tracking angle and steps can be adjusted. There are no minimum or maximum angle boundaries for rotation of panel. Overall, the objective is to develop a mechanism which can track sun more flexibly by means of angle and mounting surfaces. It should be mountable a and able to work on as many as possible planes. It should consume less power as much as possible.
1.7 ARRANGEMENT
The main objective for XYZ mechanism was to create a structure which can rotate 360° so the tracking sector can be adjusted anyway. For Achieving 360° rotation, there should not be anything in the path of PV panel. The only solution was to keep the panel cantilever. The entire structure has been mounted on a plate. Instead of PV panels, the acrylic plate has been used in the prototype. For precise positioning, stepper motor has been used. The plate has been mounted on a steel shaft. Two flange bearing has been holding the shaft which reduces friction and allows the shaft to move freely.
1.8 SUMMARY
This chapter introduced to the current scenario of energy consumption and energy production. It also entails various renewable and non-renewable energy sources. It explains why solar trackers are required and should be used more. The statistics and graph show that solar tracking is more efficient than conventional fixed panels. After explaining various types of solar trackers and its’ advantage and disadvantages, it epitomizes previous work on solar trackers from different researchers. At the end, it says the research objective and motivation. Next Chapter is about the design of XYZ mechanism in detail.
CHAPTER 2 DESIGN OF XYZ MECHANISM
2.1 INTRODUCTION
This chapter explains design and working of XYZ mechanism. Design of XYZ Mechanism includes two parts i.e. Mechanical part and Control part. This chapter is focused on the mechanical part and various components used in it. Most of the parts were ground, cut, drilled and machined on milling machine and lathe when needed, and fabricated in University and few premachined parts were ordered.

Figure 3. Lathe machine.
Lathe machine was used to facing, turning, drilling, boring, surfacing and cutting the small components, where accuracy was required. Different HSS( High-Speed Steel) tools were used for different processes.

Figure 4. Milling machine.
Milling machine was used to get the precise holes for bearings, shafts etc. Milling machine generally used for heavy duty job and where accuracy is the utmost priority. With help of digital indicators, accuracy up to 0.001inch.


Figure 5(a). Drill Press. Figure 5(b). Drill Machine Chuck.
 A drill press was used to drill holes in the fabrication process. Vertical drill press performs better in all material. It was used to drill in aluminum and acrylic most of the time. Figure: 5(a) shows the slotted table where the job needs to be mounted. For accuracy, a vice can be used to hold the job firmly. The table can be lowered and raised if the height of the job exceeds the clearance. Figure: 5(b) shows the drill bit which was used to drill a hole in the aluminum plate. The drill bit was held by the chuck. It can hold a wide range of sizes of bits. The whole structure was connected to a spindle. The weight of the structure helps to gain stability in drilling. Some parts were ordered from external sources, and few of them were designed in the different measurement system. To make those parts compatibles with rest of the prototype, necessary conversions needed to be done. As an example a bearing was imported from the outer source. It was designed for different measurement and unit system. To make the mounting holes in plates following table was referred.
A drill press was used to drill holes in the fabrication process. Vertical drill press performs better in all material. It was used to drill in aluminum and acrylic most of the time. Figure: 5(a) shows the slotted table where the job needs to be mounted. For accuracy, a vice can be used to hold the job firmly. The table can be lowered and raised if the height of the job exceeds the clearance. Figure: 5(b) shows the drill bit which was used to drill a hole in the aluminum plate. The drill bit was held by the chuck. It can hold a wide range of sizes of bits. The whole structure was connected to a spindle. The weight of the structure helps to gain stability in drilling. Some parts were ordered from external sources, and few of them were designed in the different measurement system. To make those parts compatibles with rest of the prototype, necessary conversions needed to be done. As an example a bearing was imported from the outer source. It was designed for different measurement and unit system. To make the mounting holes in plates following table was referred.
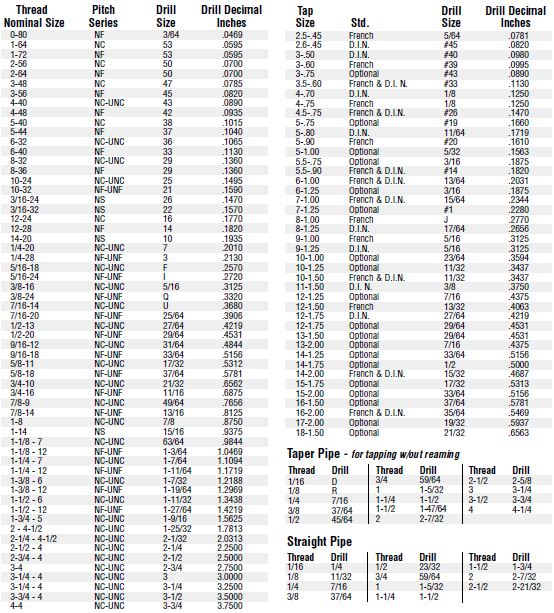
Figure 6. Tap and Drill bit selection guide.
As per bearing dimension 0.1935 inch wide hole needed to be drilled. To match it 10 number drill was selected.

Figure 7. Grinder belt and Buffing wheel.
Grinder belt and buffing wheel were used for finishing and taking off the extra material from edges and drilled holes. It was also used to adjust corners and surfaces which cannot be done on any other machine.


Figure 8(a). Vertical Bandsaw Machine. Figure 8(b). Slotted Table and Blade
Vertical Bandsaw was the primary part of the fabrication. Bandsaw was used to cut all other components from the main plate. Basically, it’s a long blade mounted on two rotors. Blade speed can be increased and decreased for different materials.
2.2 PARTS
Majority of parts are made from 3/16 inch thick aluminum alloy plate. The plate was selected because the alloy fulfills all the criteria. The material should be strong enough to withstand the load, it should not deform under operating condition and fatigue. It should be light weighed, easily machinable, and affordable. Figure .8 shows aluminum alloy plate which was used in fabrication.
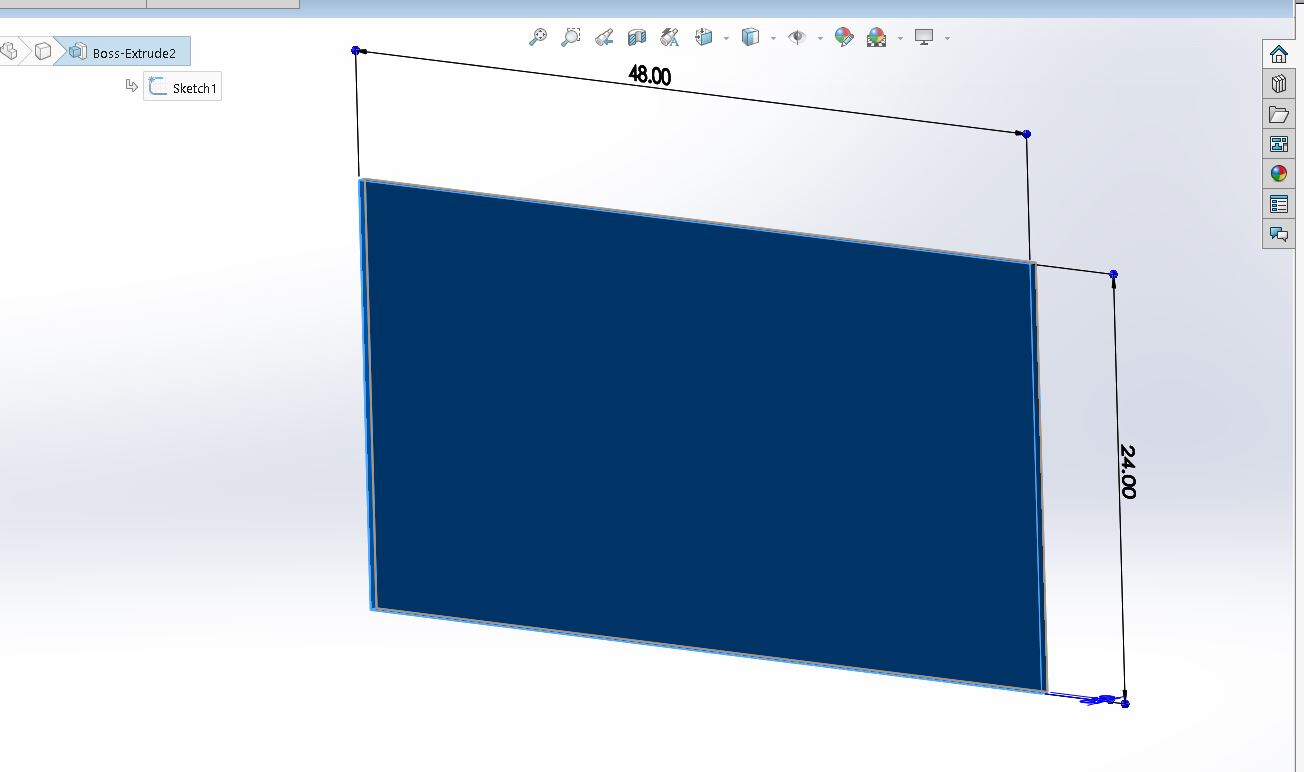 Figure 8. Screenshot of Aluminum alloy plate with dimensions from SolidWorks.
Figure 8. Screenshot of Aluminum alloy plate with dimensions from SolidWorks.
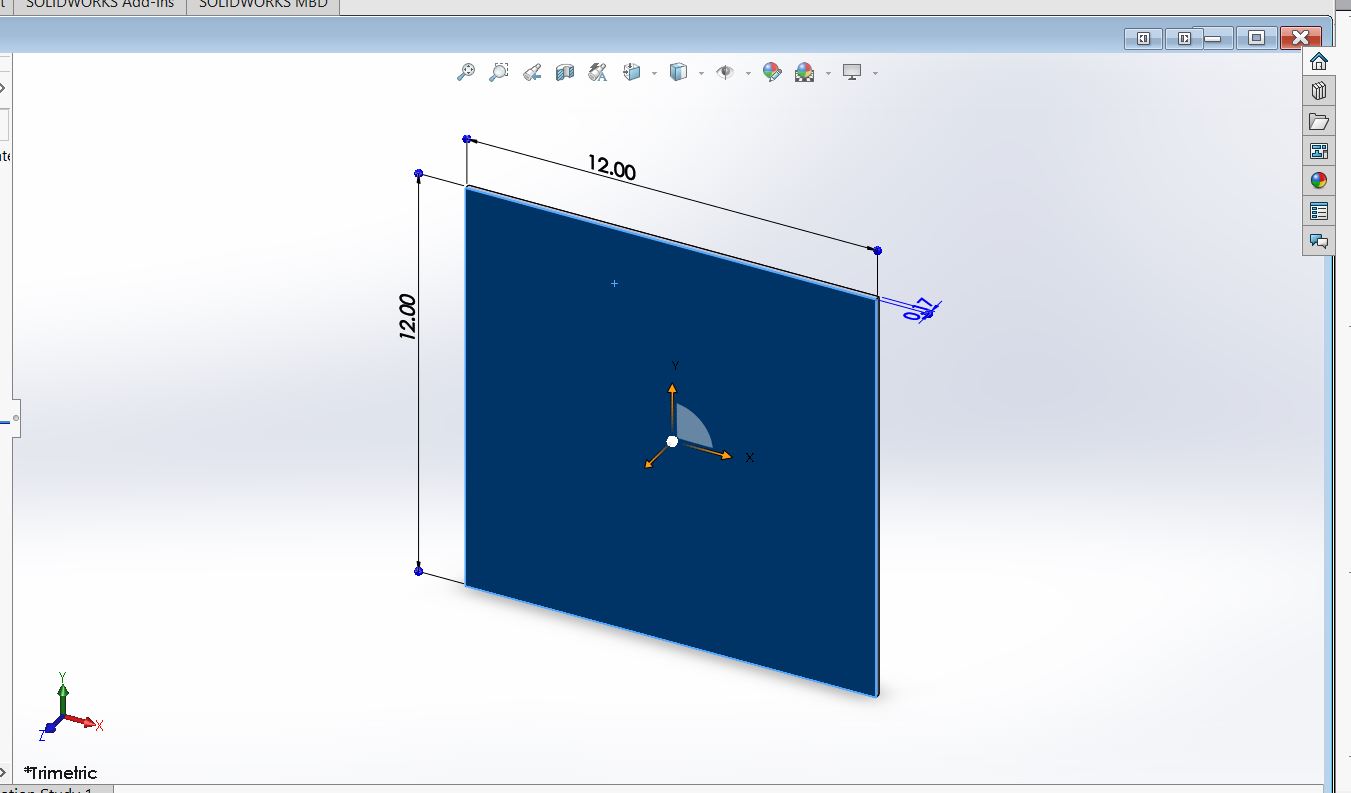 Figure 9. Screenshot base plate with dimensions from SolidWorks.
Figure 9. Screenshot base plate with dimensions from SolidWorks.
First of all, a 12” *12” of the aluminum plate was cut as a base. Using heavy and wide base was purposely because it lowers the center of mass and center of gravity. By lowering the center of gravity and center of the mass overall structure becomes more stable. To mount plate and another mechanism, certain height needed to be achieved.
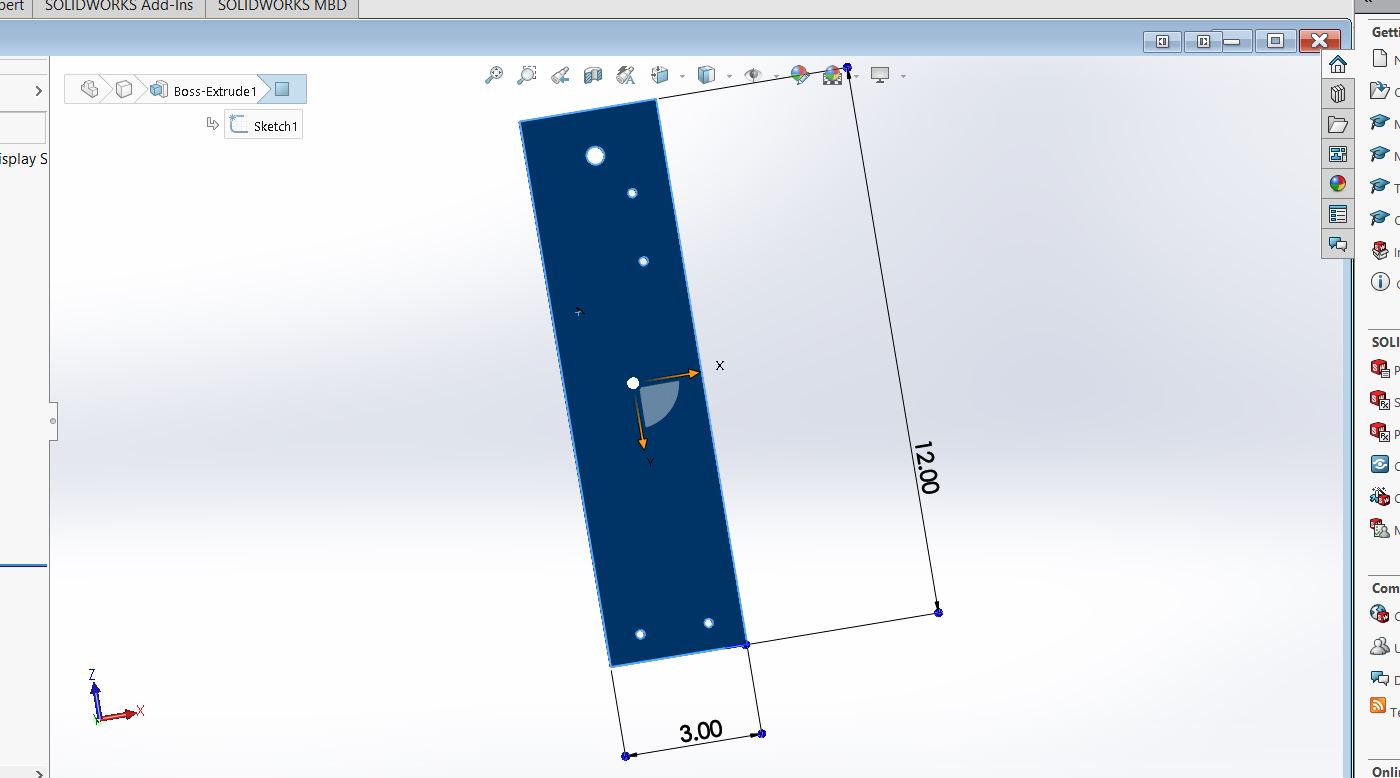
Figure 10(a). Side plate L.
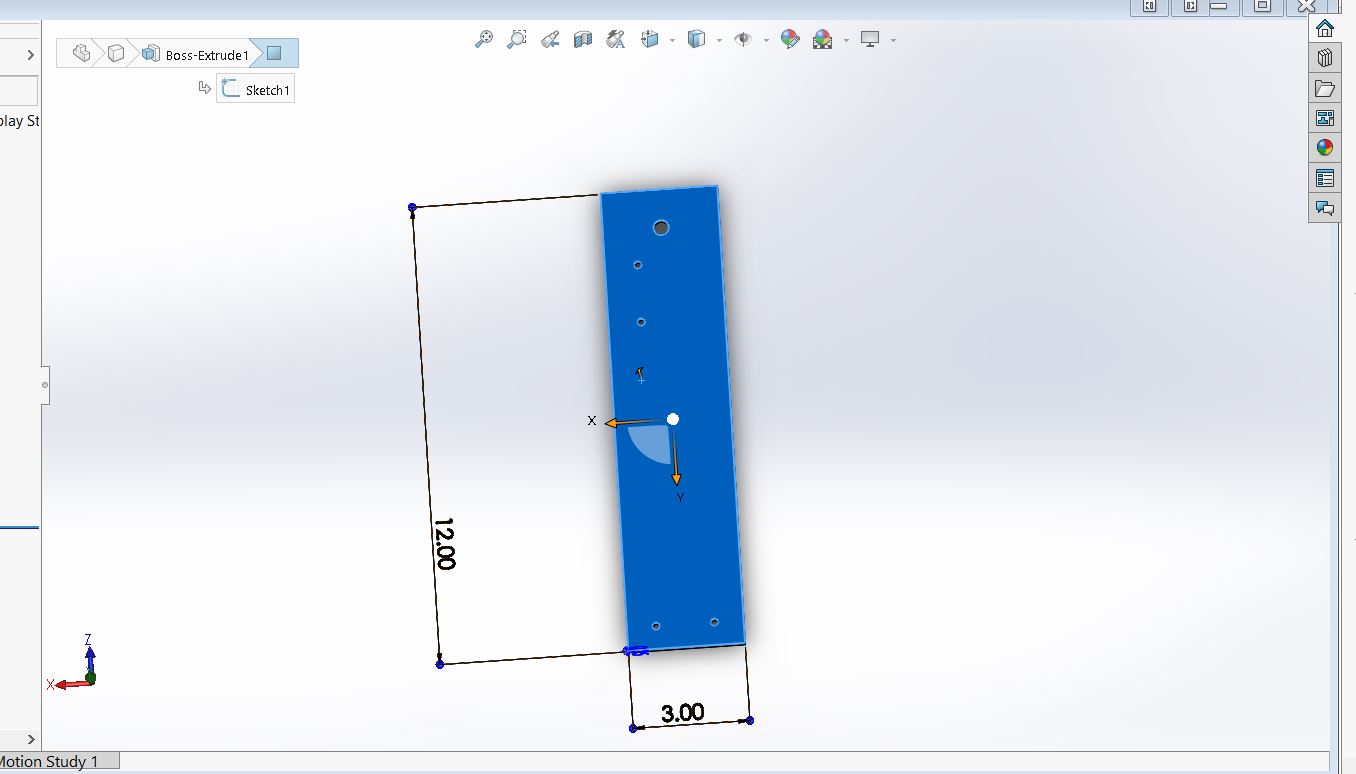
Figure 10(b). Side plate R.
Figure 10(a) and 10(b) are used to mount entire mechanism and plates to a certain height. The aim of XYZ mechanism was to get rotational freedom of 360°. The panel should not touch the base plate or any other surface or part so the height of center shaft should be at least half of the length of the panel. It was raised 12 inch and 3 inch wide for more stability at the bottom.
Side plates provide structural strength to the prototype. Nut and bolt are used to join different parts to each other. Both side plates have 5 holes in it. Basically, 4 of them are for clamps. The large hole is for the shaft and bearing.
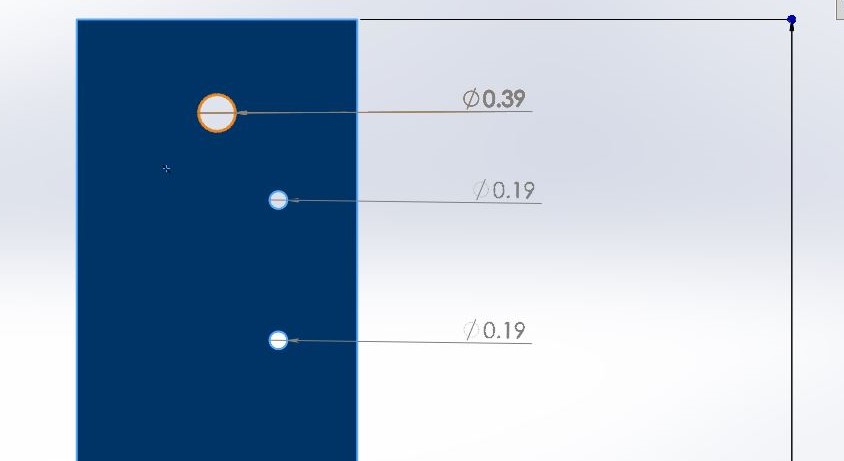
Figure 11. Side plate L top
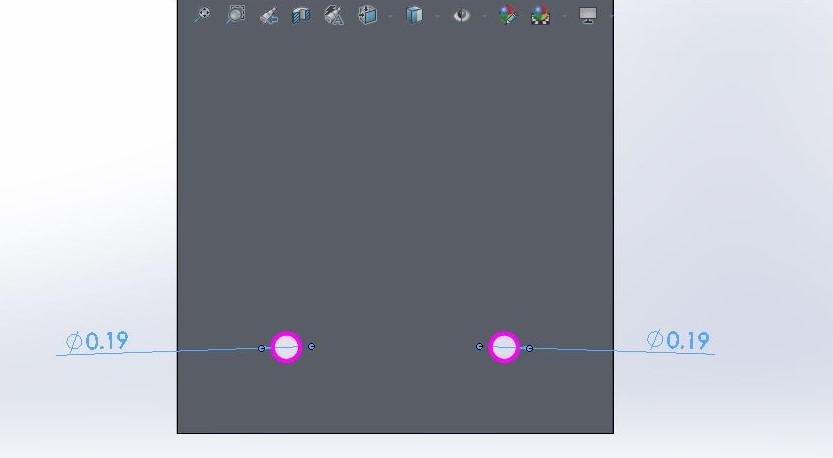
Figure 12. Side plate L bottom
Here, Figure 11 and 12 shows the dimension of the holes. For the bolt in the plate, four holes with a diameter of 0.1938 inch are drilled. The center hole of a diameter of 0.3913 inch was drilled to hold the shaft. The center hole had to be larger than the shaft so the shaft has a frictionless rotation on the bearing. To support the cantilever part of the structure, the bearing was mounted outside.
Clamps are used to hold all parts together. Majority of clamps are 1inch wide and 3 inch long. Each side has two holes with a diameter of 0.1938 inch. A pair of clamps were used to mount side plate L and side plate R to the base plate. The Same set of bolt and nut were used to join them together.
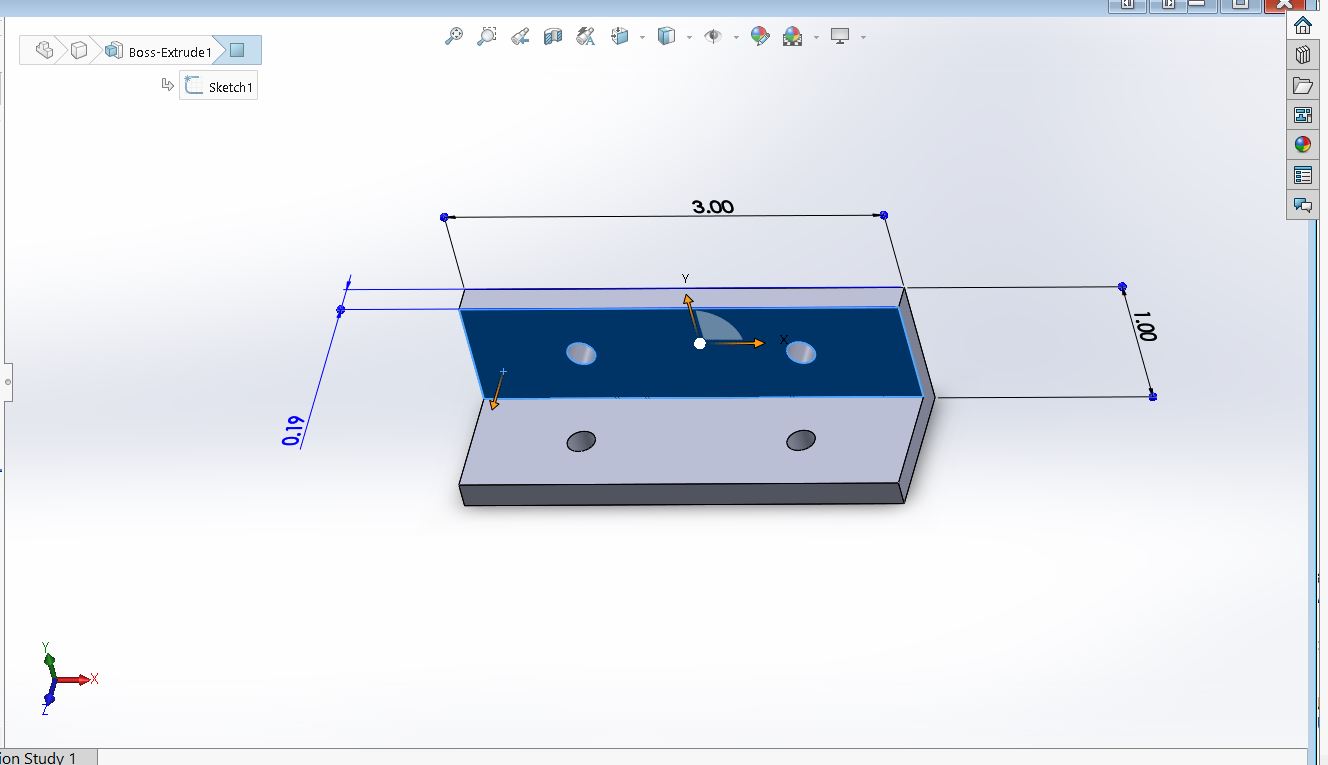
Figure 13(a). Isometric view of Clamp
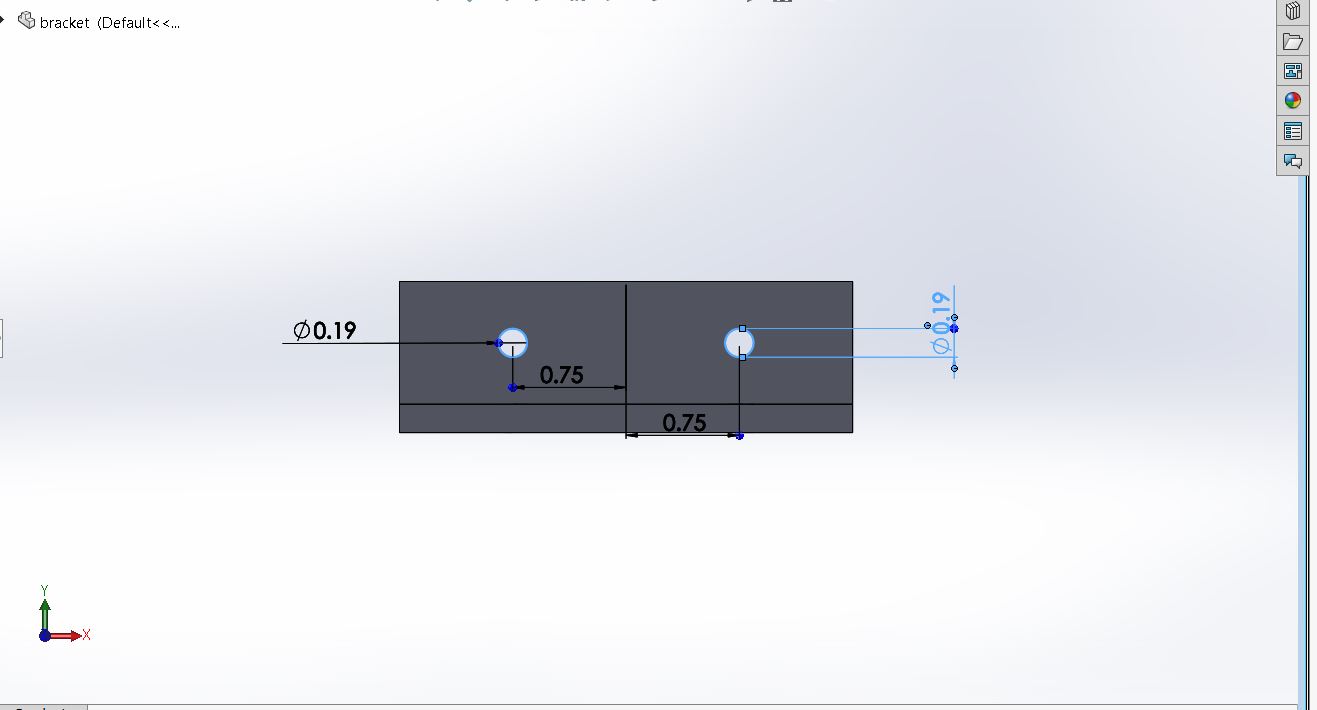
Figure 13(b). Front view of Clamp
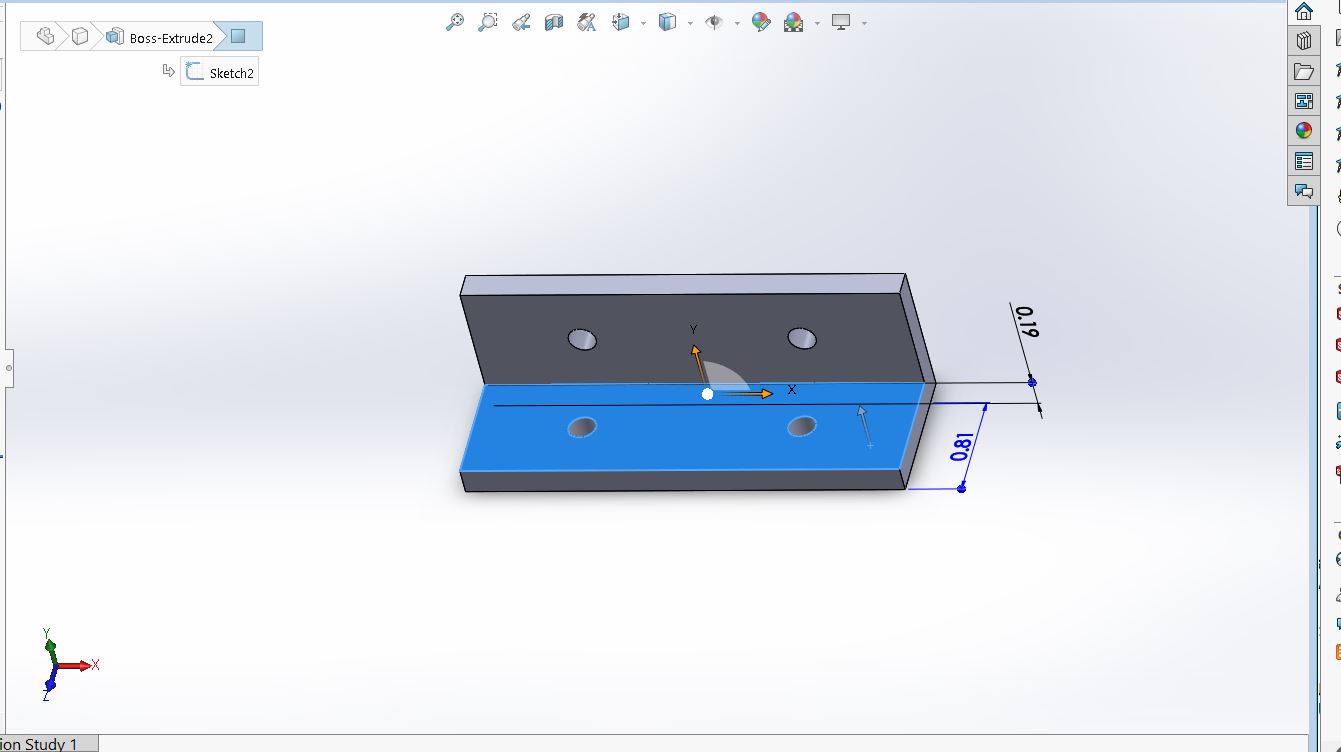 Figure 13(c). Isometric view of Clamp.
Figure 13(c). Isometric view of Clamp.
As the first step of fabrication, two clamps (Figure 13) were mounted on a base plate (Figure 9) at the distance of 3inch from each other and facing outside. 10-24 sized screws were used to mount clamps on base plate.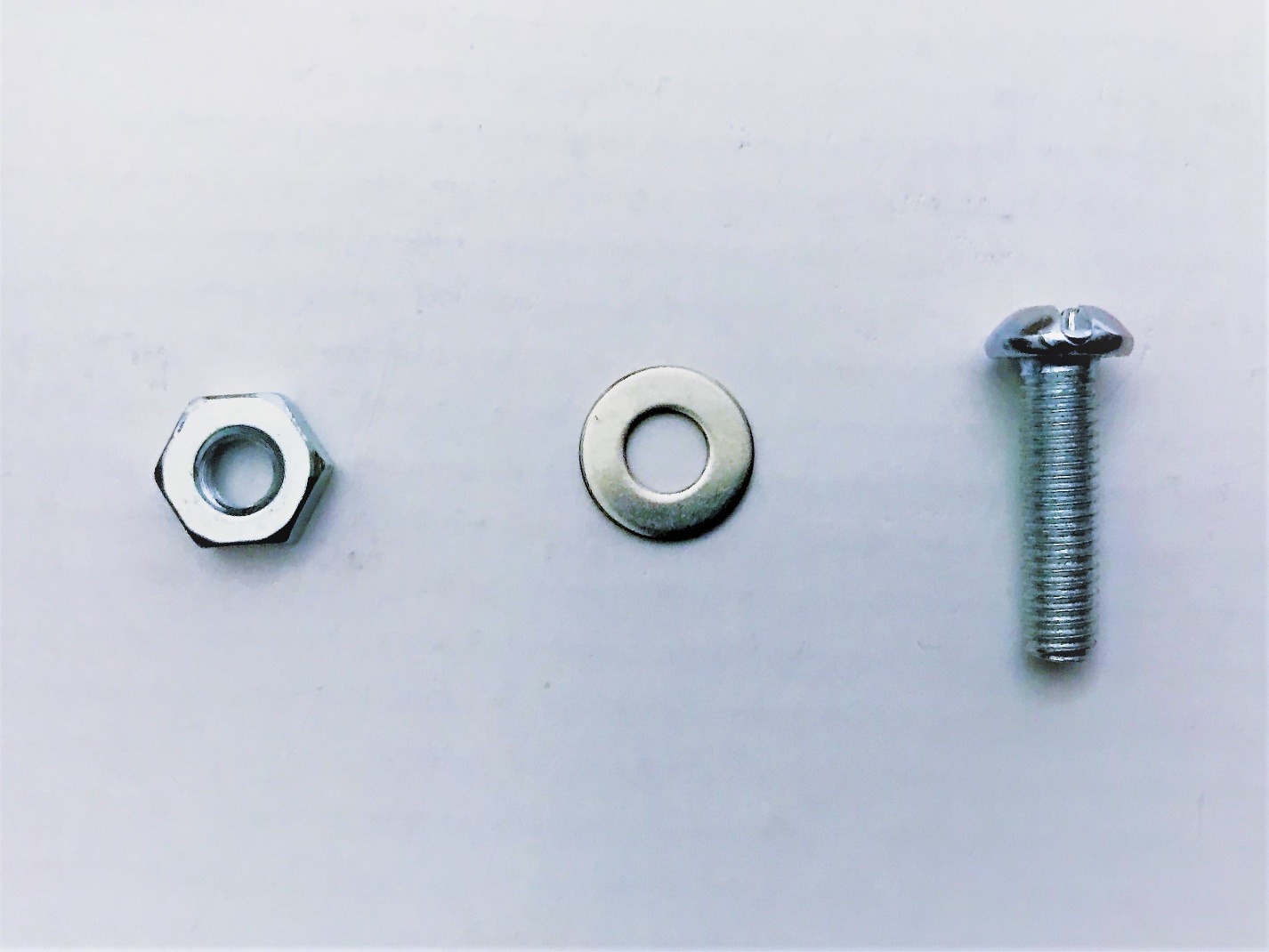
Figure 14. Number 10 Nut and washer and 10-24 Nut.
Each clamp has two screws through the base plate and two on side plates and tightened with washer and nut. To make the model more stable from the bottom, drilled holes were countersunk. It helped nut to blend in the surface.
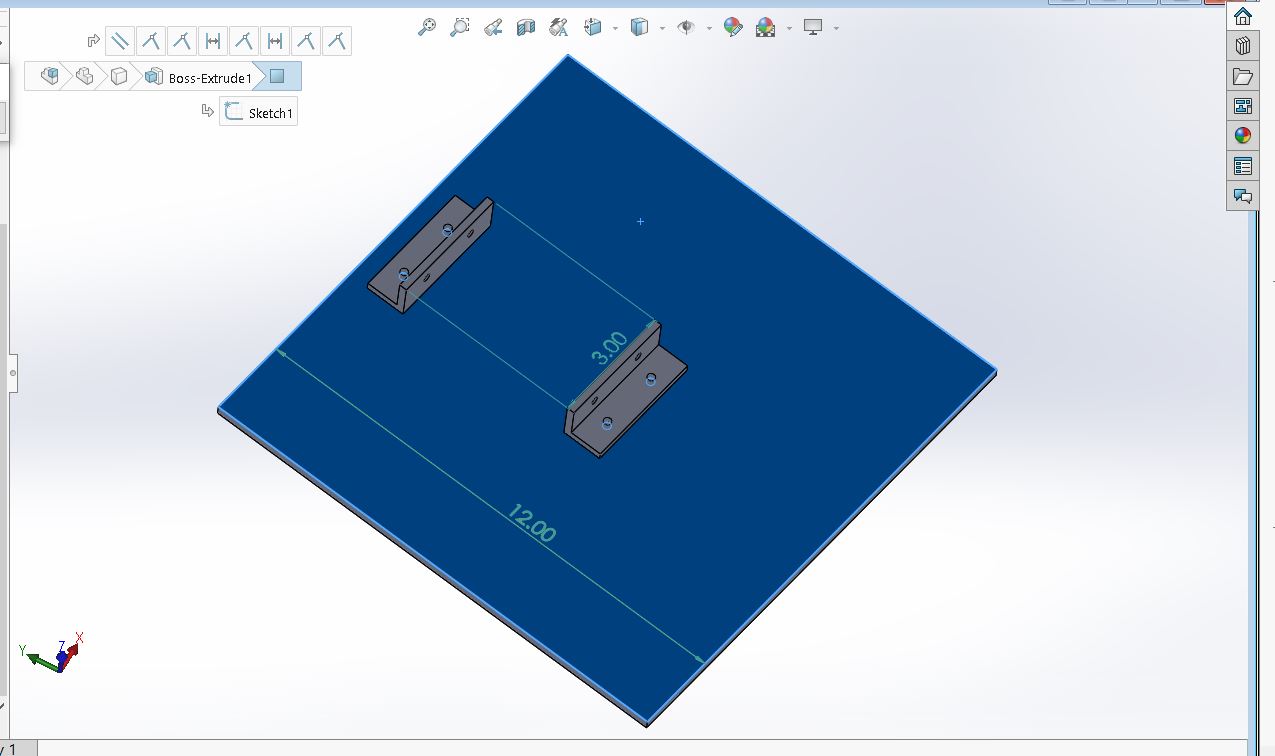
Figure 15. Clamp and base plate assembly
As a next step, side plate L and R was mounted on each clamp. It was mounted using the same set of screws. Side plates are 12 inch long so the PV plate can rotate 360° completely. The reason behind using two plates to hold the shaft and plate is to counterbalance the weight. Two plates work as lever mechanism.
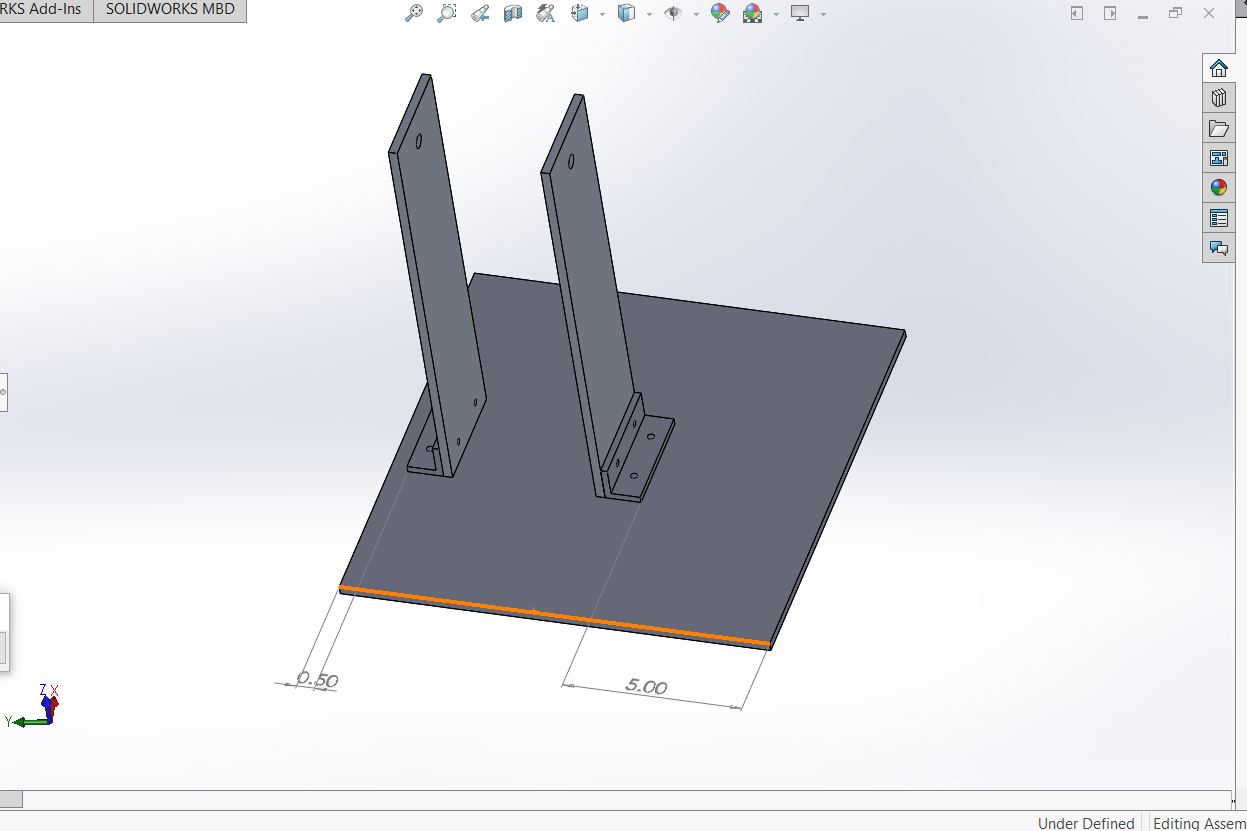
Figure 16(a). Clamp and base plate assembly with side plates L and R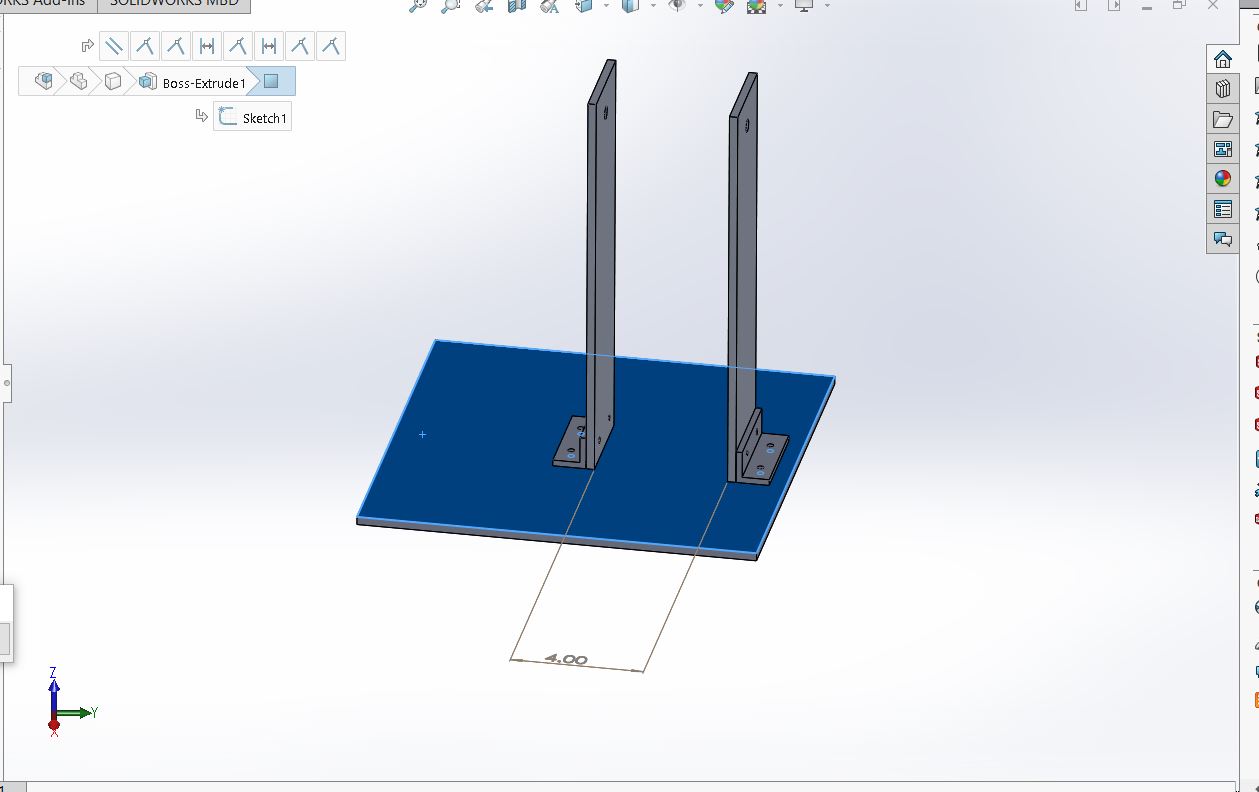 Figure 16(b). Clamp and base plate assembly with side plates L and R
Figure 16(b). Clamp and base plate assembly with side plates L and R
Designing the prototype was most important process of all. Considering every aspect of engineering, material properties, and practicality, overall aim should be achieved. On the other hand, fabrication process was more difficult. The process of manufacturing the exact part like design required high degree of precision. The lower assembly from figure 8 to figure 16 was the initial part of the fabrication, which was comparatively easy to further assembly. The upper assembly consist more complex parts and parts where more precision and accuracy was required to get the required design.
To mount the plate on a shaft where it can rotate 360°, shaft needs to be customize. Shaft holds the weight of the plate and it needs to withstand the twisting moment. High-speed steel was used to make shaft. High-speed steel has hardness and strength to avoid twisting, fatigue failure, scratching, and all other sort of possible deformation.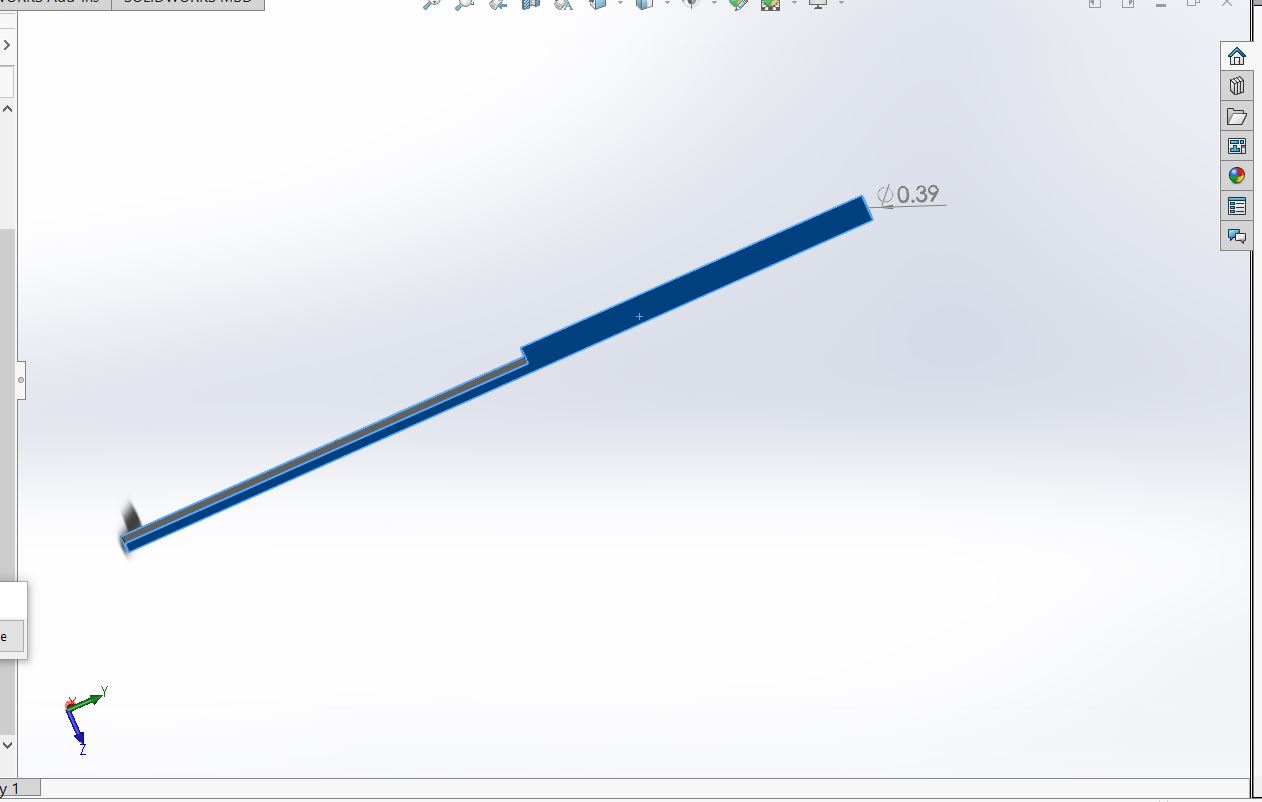
Figure 17. Shaft
To get the desired dimension of the shaft, 0.5inch thick shaft was selected. After cutting to required length it was mounted on lathe for facing. The diameter was reduced to 0.393 inch to fit in the bearing. To get more contact surface and secure enough room to put screws, the shaft was cut vertically from center. In XYZ mechanism to rotate completely the plate should be mounted on single shaft. The problem was to make the plate stable and being held on only one support.
Tracking sun throughout day should be accurate and plate should be on decided point at specific time. Any differential could cause major error at the end of the or may be over a long run. If plate is mounted on one shaft it cannot stay stable and it could have radial movement on shaft. Even few degrees can affect the overall mechanism. To make plate more stable, contact surface and contact point needs to be increased.
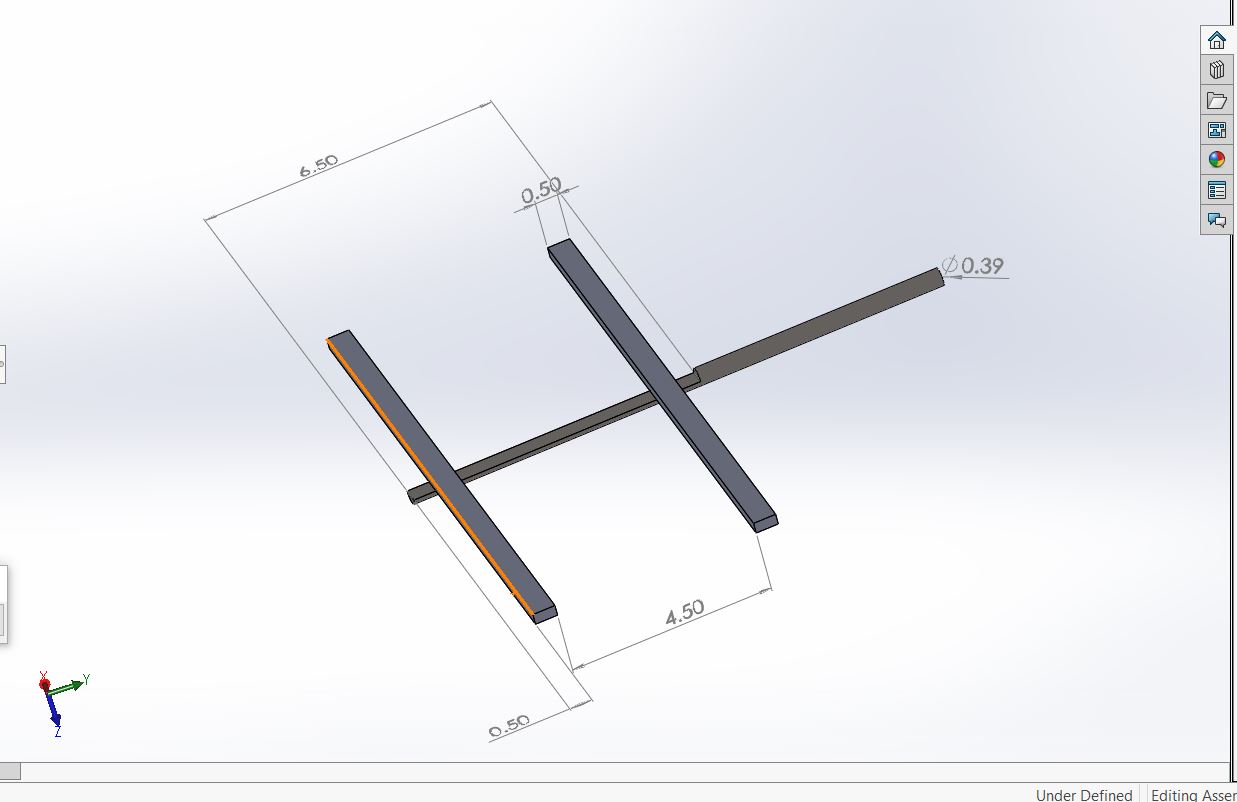 Figure 17. Shaft and support bar assembly
Figure 17. Shaft and support bar assembly
Supporting plate with two bars at certain distance was enough to gain stability and make plate withstand any external forces such as wind and dust. By adding two bars, contact surface was increased and point of contacts were increased too. Each bar gave three screws trough plate. Once the mounting bars were stable mounting plate was more reliable.
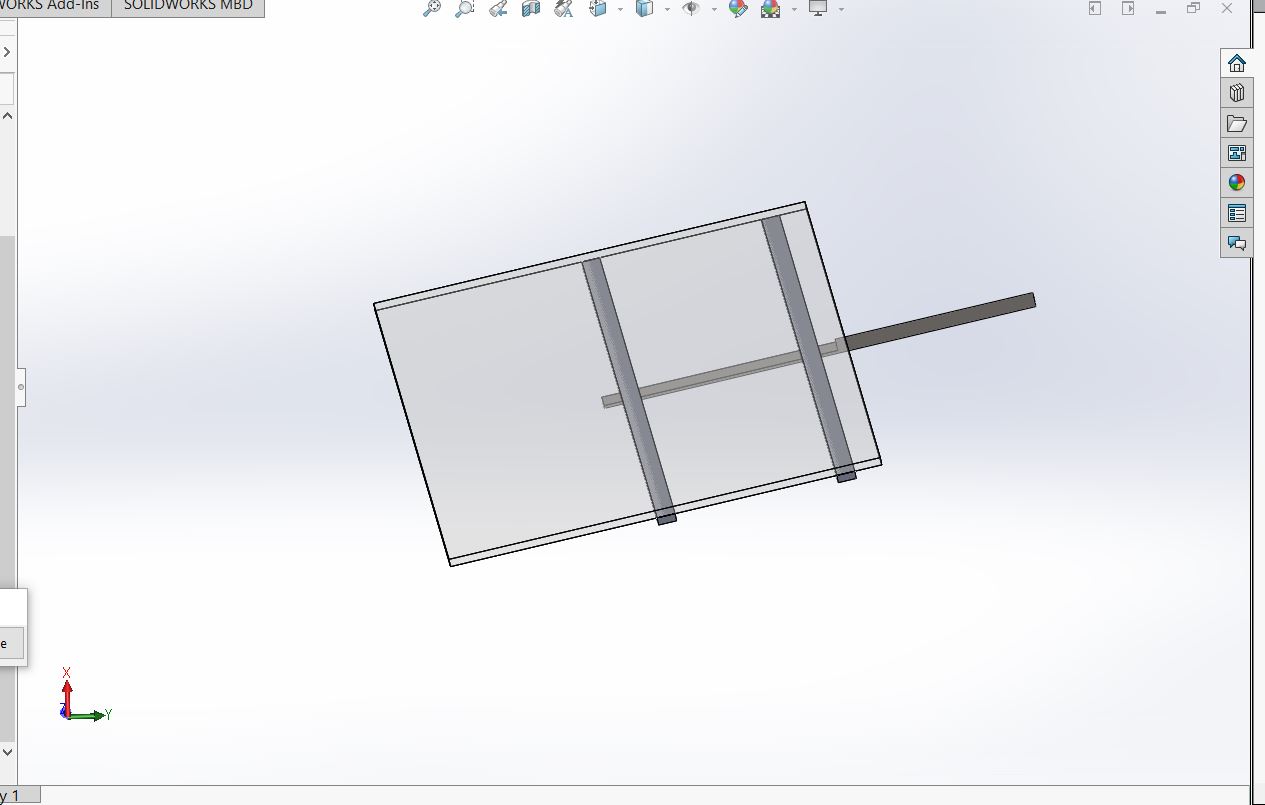
Figure 18(a). Shaft and support bar assembly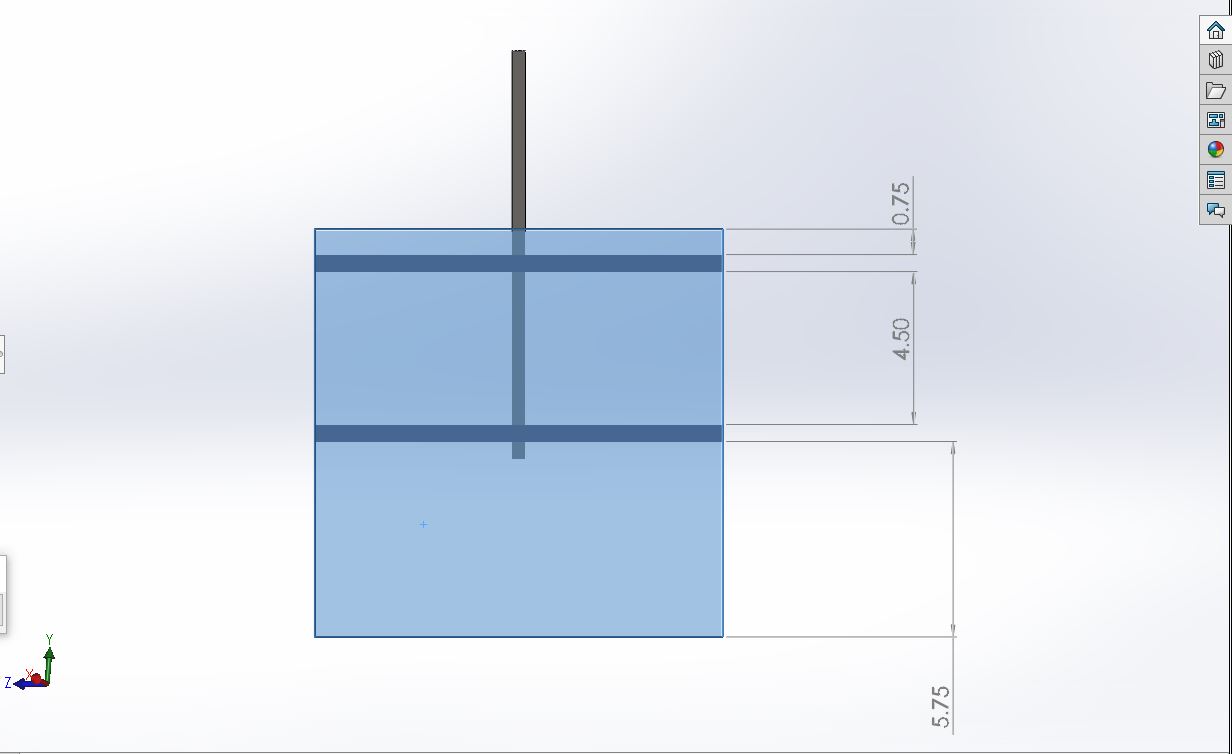 Figure 18(b). Shaft and support bar assembly
Figure 18(b). Shaft and support bar assembly
After adding enough support, the plate was reliable to mount. Now instead of the shaft acting as point load, the bars and shaft act as UDL (Uniformly Distributed Load). The shaft and plate assembly was attached to the lower assembly. AXIAL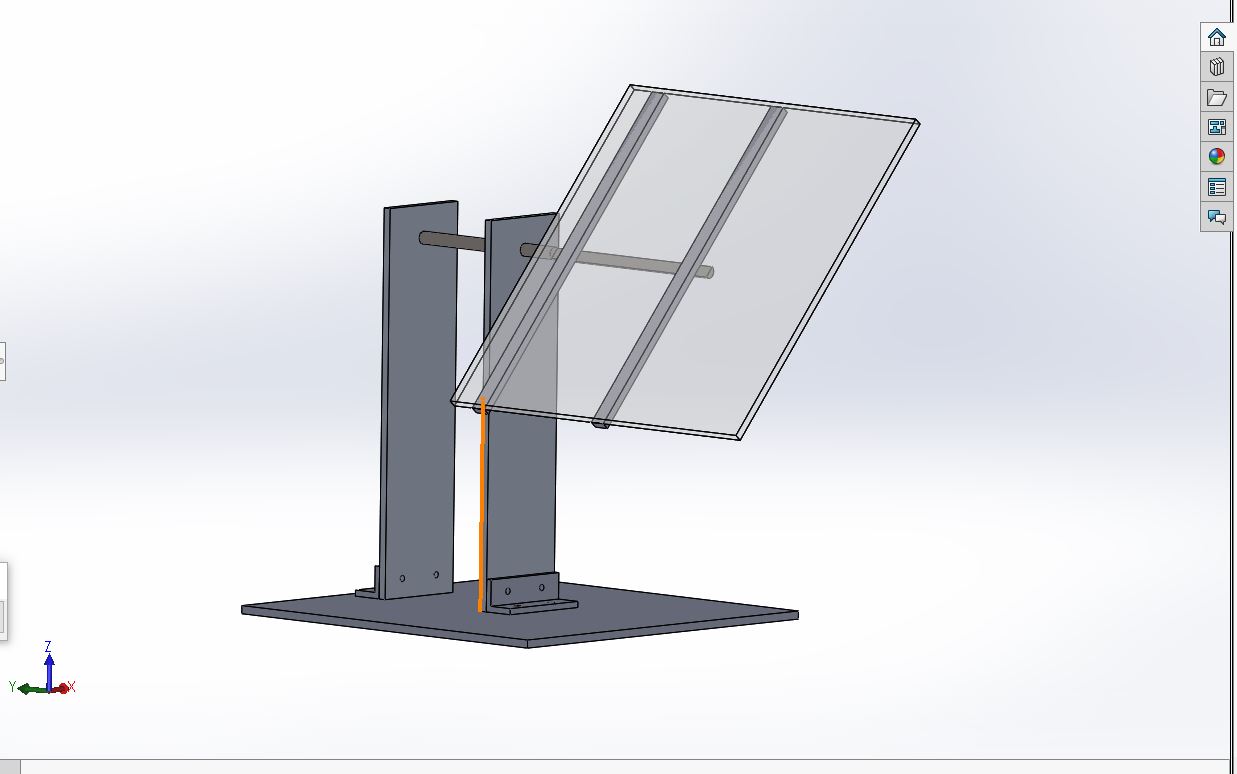 Figure 19. Shaft and support bar assembly with base structure
Figure 19. Shaft and support bar assembly with base structure
For smooth and friction free rotation two flange bearing were used. Needle Flange bearing helps to rotate shaft. One of those were used to hold the shaft on each plate. Both bearing faces towards plate. It gives a little more support on cantilever side.

Figure 20. Needle flange bearing
The next step was to rotate the mechanism. As mentioned earlier tracking the sun require high accuracy and to get accuracy the plate rotation should be sharp. Any sort of backlash could result in inaccurate positioning and wrong results. For such exact movement, only stepper motors could be useful. A stepper motor is one sort of electric motor utilized as a part of the mechanical and manufacturing industry. Stepper motors move a known interim for each signal they receive from driver. These signals are given by a stepper motor driver and is stated to as a step. As each progression moves the motor a known separation it makes them convenient gadgets for repeatable situating. Stepper motors have stopping points. It’s called steps. An entire 360° rotation partitioned by the step angle gives the number of steps per revolution. Different stepper motors have different step angles. It varies from 1.8° to 15° and may go beyond that. Steps less than 1.8° are generally called micro steps.
SolidWorks was used to get the idea about required torque to rotate the mechanism and make it steady enough to resist wind and dust. To transmit the power bevel gears were the primary idea but bevel gears has two-way motion i.e. driver gear to driven and driven to driver as well. So, in some case external forces on the plate could rotate the shaft and motor, which is unwanted. The last straw was to stop the radial movement of shaft. By the motor, shaft can be controlled and rotated but to stop the shaft to rotate motor and stop any other sort of unwanted forces, it needed to be locked. Locked in the way it should not be monitored or needs separate attention. Only possible flow of power should be driven to driven not the other way around.
There was only one choice to self-lock the mechanism and make it stable, to use worm and worm wheel. Worm and worm wheel are case of a screw, one of the six straightforward machines.
 Figure 21. Worm design in SolidWorks
Figure 21. Worm design in SolidWorks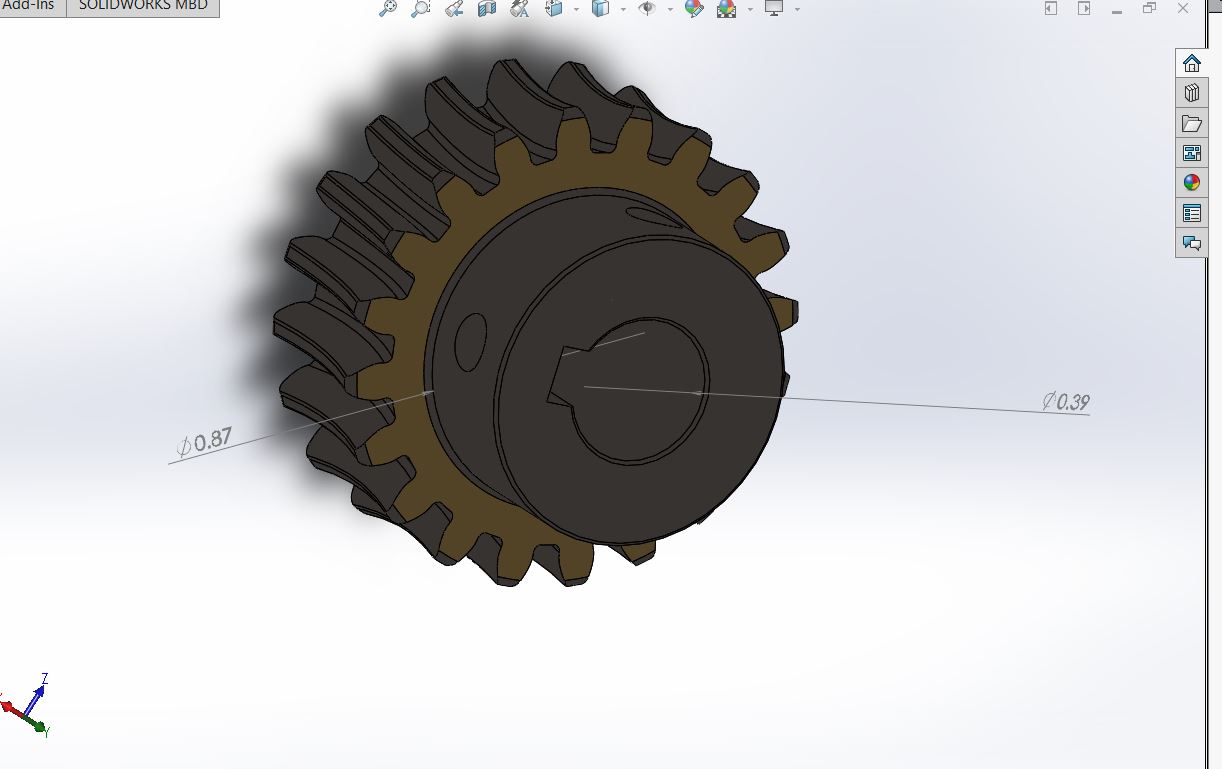 Figure 22. Worm wheel design in SolidWorks
Figure 22. Worm wheel design in SolidWorks
Like other gear provisions, a worm drive can lessen rotational speed. Worm and worm wheel mechanism can also transmit higher torque. One of the significant focal points of worm outfit drive units are that they can transfer rotation and power in 90 degrees. 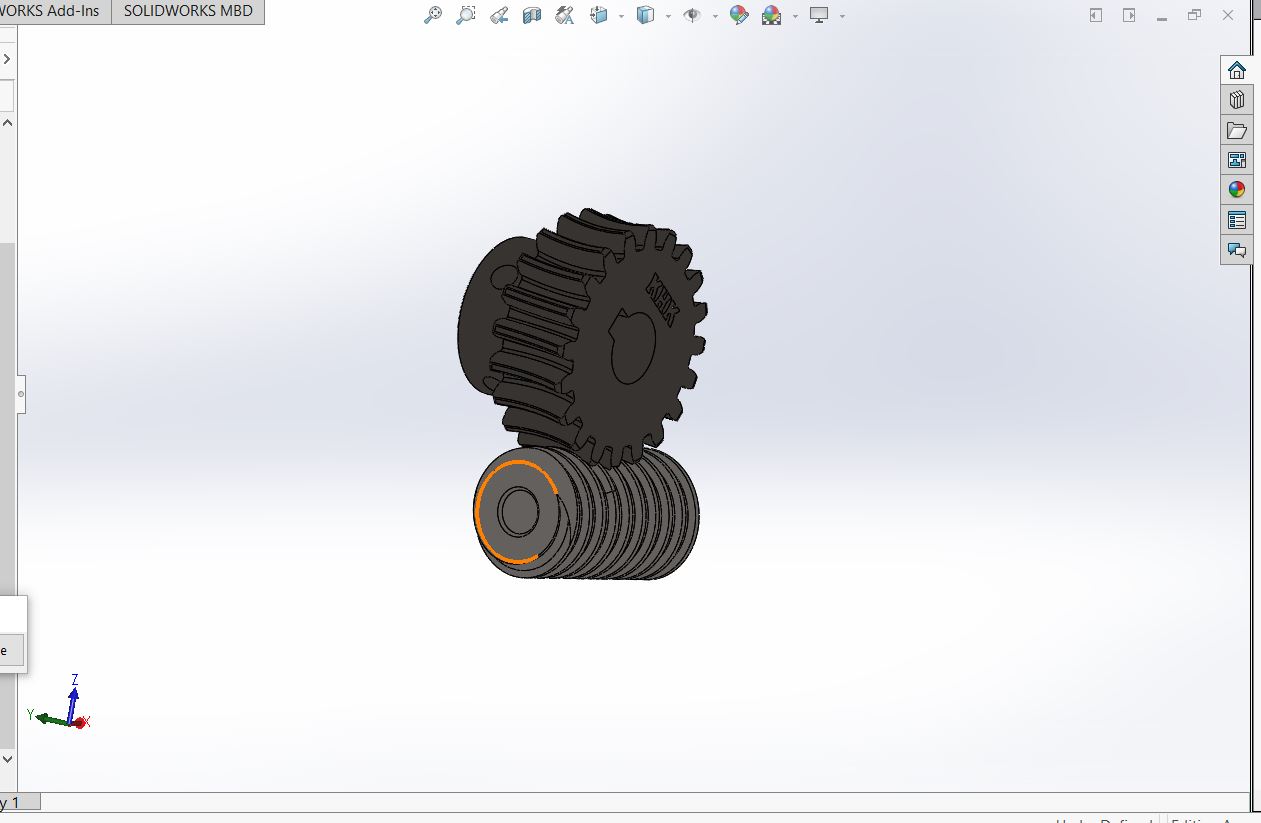
Figure 23. Worm and worm wheel meshing
Here, figure 23 shows the meshing of worm and worm wheel. Worm is made of cast iron and worm wheel is made of brass. Using worm set helps to rotate plate on minor scales and it can be more accurate. Every worm gear set have a reduction ratio. With a solitary begin worm, the worm-wheel progresses just a single tooth of the gear wheel for each 360° turn of the worm. Therefore, irrespective of the worm’s size, the gear ratio is the number of teeth of the worm wheel to 1. As example if worm wheel has 40 teeth so the ratio would be 40:1.
In this case worm wheel has 30 teeth so the reduction ratio would be 30:1. It is proper to stepper motor’s step angle and with this ratio the calculation was more feasible. Worm gear set so not allow reverse movement, it means only driver can drive driven gear it cannot go other way. Worm act as driver gear because it is powered by motor, worm can rotate worm wheel. Vice versa, worm wheel cannot rotate worm. It helps to make plate stable and withstand external forces. It might generate axial movement, but grub screw on worm and worm wheel can obliterate that.

Figure 24. Grub screw for worm and worm wheel
A grub screw is a kind of screw, for the most part, used to securely hold from inside or against another object, ordinarily not utilizing a nut. It was used to stop gliding, axial movement, and radial movement on shaft.
The last part was to fabricate mountings and clamps for the motor and worm. For mounting plate for motor, 4inch * 3inch plate was cut. And it was drilled holes for motor and center shaft. The center hole had to be large enough that it should not interfere worm. Worm was mounted on motor shaft with help of custom sleeve. And grub screw was used to keep worm and sleeve together fixed on motor shaft.
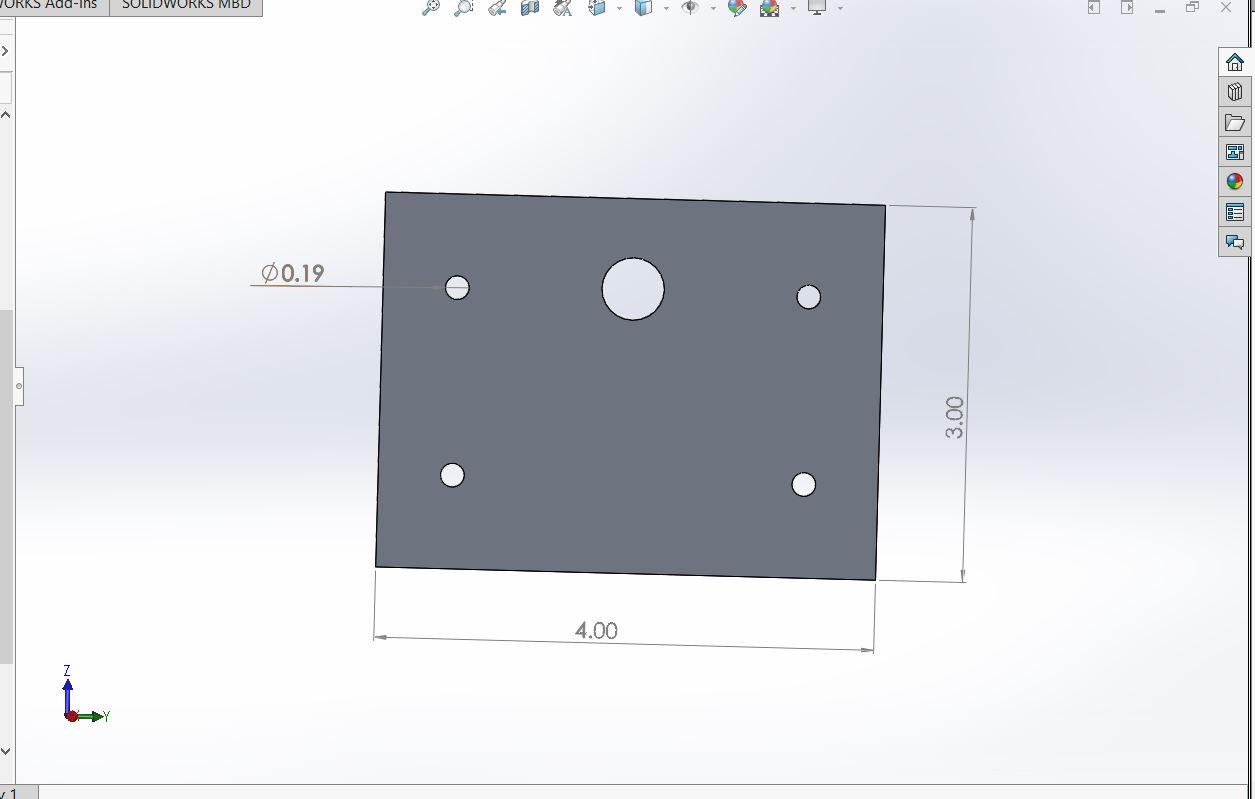
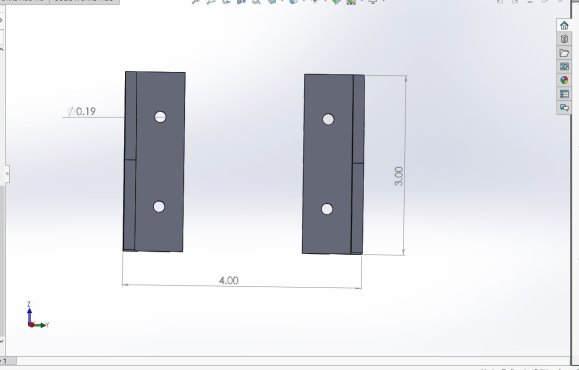 Figure 25. Motor mount
Figure 25. Motor mount
Figure 26(a). Motor mount clamps front view

Figure 26(b). Motor mount clamps isometric view
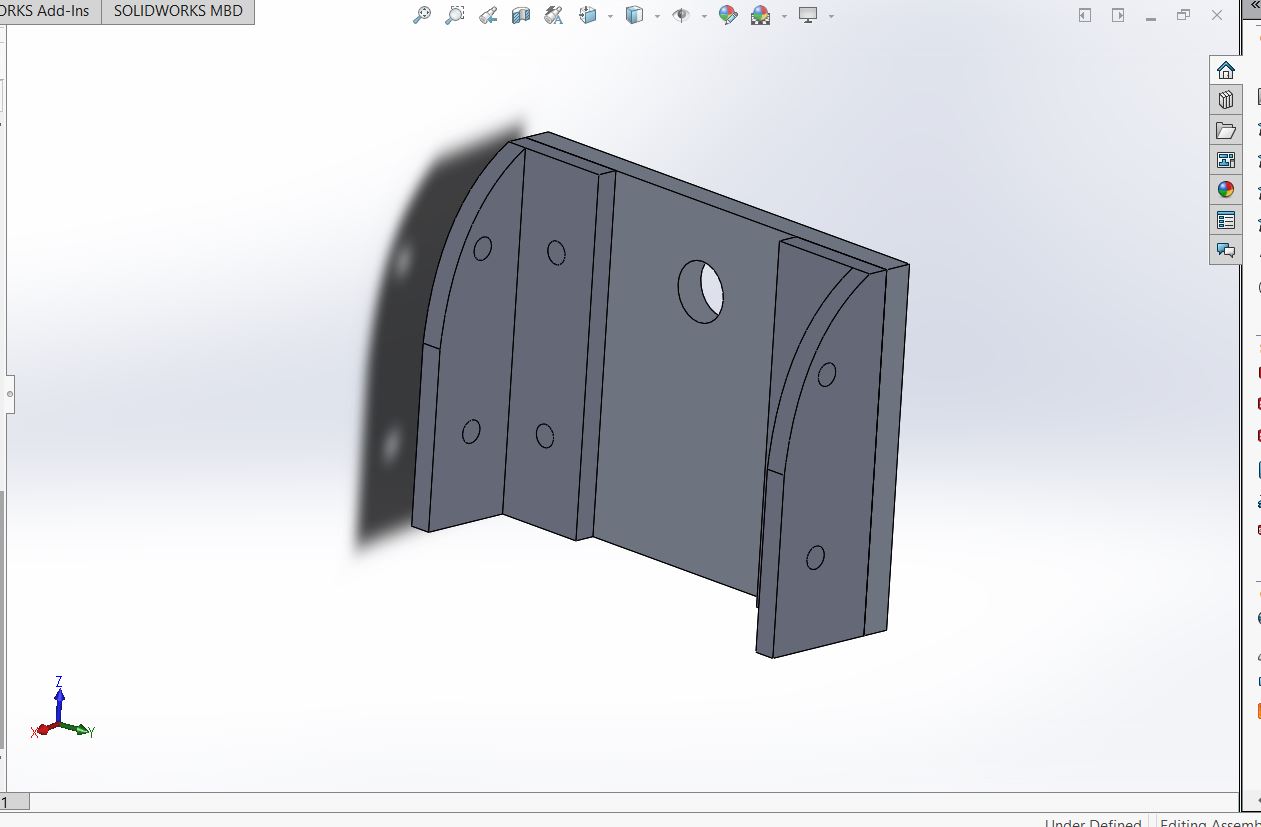
Figure 27. Motor mount with clamps
Here, figure 25 shows motor mount as discussed. To rotate the plate, NEMA (National Electrical Manufacturers Association) 17 motors has been used. It has four threaded holes for, it was mounted with m3 * 0.5 screws. Figure 26 (a) and (b) shows clamps for joining motor mount with side plates. To make worm close to worm wheel clamps were designed differently. It was machines in a curve such as it does not affect the strength and overall durability. Where figure shows the assembly of motor mount and clamps. Now next step was to put motor in the clamp and mount it. For designing purpose, a non-exact model of motor has been mounted.
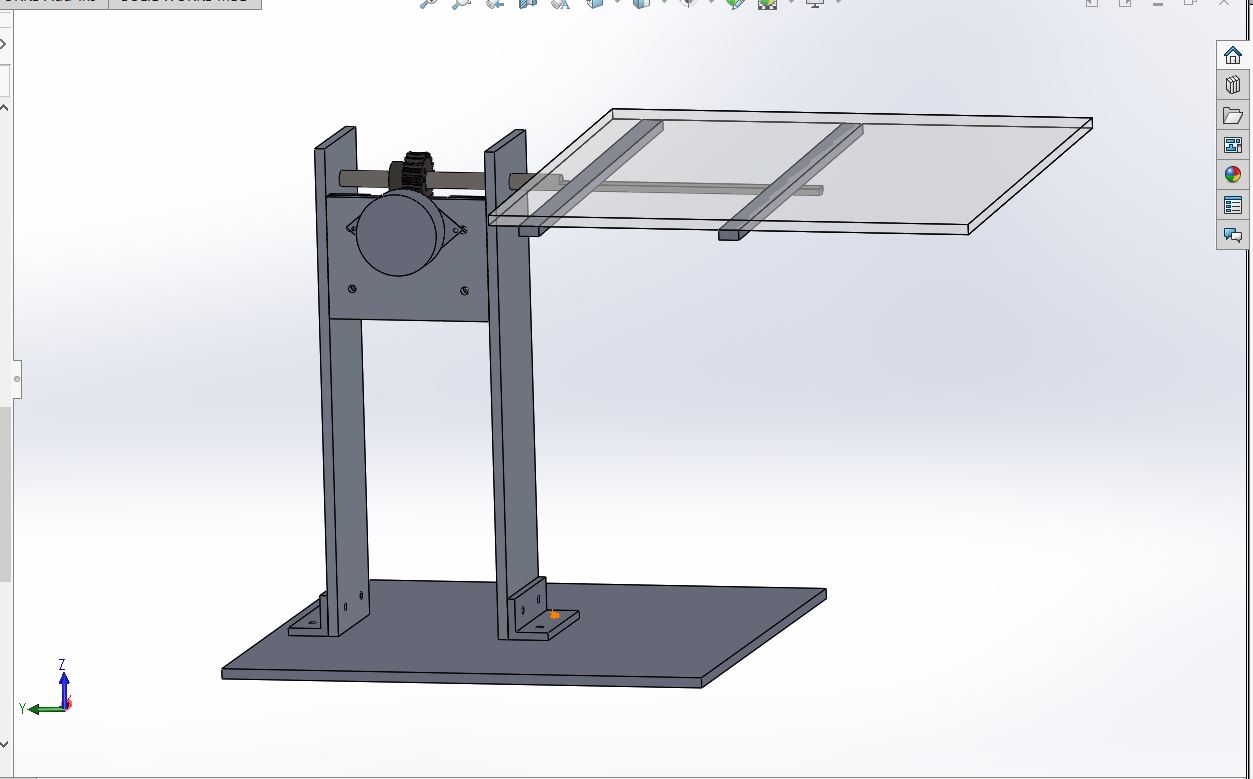
Figure 27(a). XYZ Mechanism
 Figure 27(b). XYZ Mechanism
Figure 27(b). XYZ Mechanism
Here Figure 27 (a) and (b) shows the final assembly of XYZ mechanism. From base plate to side plates, clamps, mountings, gears, shaft, bars, and plate all together. The design is feasible to achieve aim. Precise fabrication could make it work. With XYZ mechanism, plate can rotate 360° with no obstruction and we can track sun whole day. Sun changes its path in every season, with XYZ mechanism the rotation of plate can be adjusted and controlled.
2.3 SUMMARY
This chapter discuss the XYZ mechanism and idea behind it. It is important to understand that how important the solar energy is, and conventional solar panels needs improvisation and advancement. Initial part of this chapter mentions all the machines that used in fabrication. And explains every machine works and what sort of machining process can be done on each of them. From lathe to milling machine, drilling machine, cutter, and grinder. It also mentions that how to select tap and drill sizes.
Second half clarifies the design of XYZ mechanism by visuals from SolidWorks. It also justifies what material is used and why. Aluminum was selected for the fabrication because of its easy machinability. Chapter focus on how from raw aluminum plate, each part was cut, drilled, grinded and joined to other parts. Total assembly was divided in two parts. First was lower assembly and second was upper assembly, just to make description easy. Primary step in lower assembly was to cut the base plate and then cutting side plate L and side plate R from main plate. and connecting them with clamps and screws. Where upper assembly cover the shaft and bearings and how plate is mounted with help of two acrylic bars. At the end it indicates that how the self-locking mechanism works and how the gear ratio works.
The next chapter will be covering the control part and other required electrical components. The specific purpose of each part will be explained.
CHAPTER 3 CONTROL PART
3.1 INTRODUCTION
This chapter covers the control part of XYZ mechanism. It entails the selection on motor, microcontroller, driver and all other components that may be required. Even after the mechanical design, the control parts remain challenging. To control the direction of the panel depends on multiple factors such as motor torque rating, current, voltage, what sort of microcontroller and driver are being used. Motor should have enough holding torque to make the plate stop and steady at certain point. All other points and issues are mentioned in this chapter.
3.2 PURPOSE
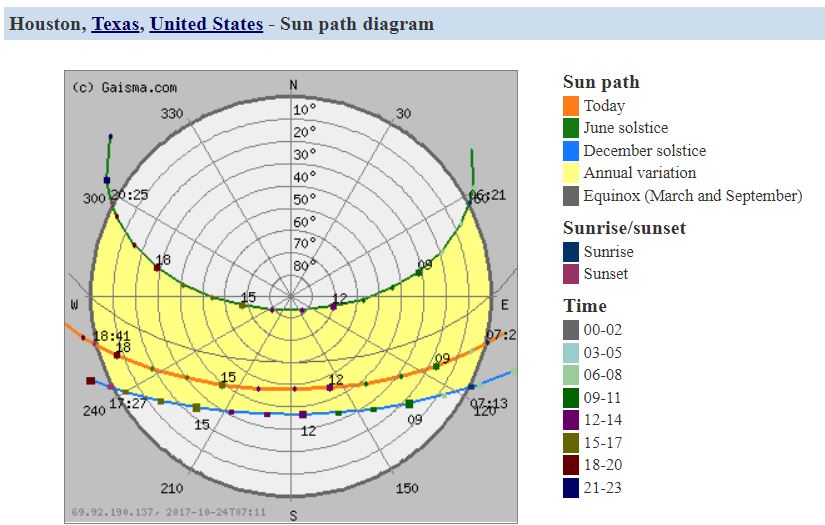
Figure 28. Solar path on 10/24/2017 on altitudes of Houston, TX.
Sun rise in east and set in west. Throughout the day it moves at constant pace. Sun’s path, which is also known as day arc, differs in season to season. Day arc allude to the regular and seasonal curvy path that sun seems to follow in the sky while earth pivots and circles the sun. The sun’s track influences the length of daytime and quantity of daylight.
For different season sun have different time span where sun expose itself to earth. For example (figure 28), on June solstice sunrise should be on 6:21 A.M. and sunset should be on 20:25 P.M. It means theoretically total exposure time is 14 hours and 04 minutes. Similarly, on December solstice sunrise should be on 07:13 A.M. and sunset should be on 17:27 P.M. which theoretically gives 10 hours and 04 minutes. Technically, solar energy cannot be generated in whole exposure time from a steady point on a ground or certain height. But for ideal case let’s assume the total exposure time is 10 hours and 00 minutes and sun covers 100° on its track. Solar energy can be generated in given scenario. Convention panel can generate certain amount of energy. But conventional solar panel are only effective in certain sector of solar path. Once Sun stop facing panel properly, panels becomes less useful and less productive. Main purpose of XYZ mechanism is to utilize the full sector of sun’s path and maximize the solar energy production from same size of panel.
3.3 INTRODUCTION TO ELECTRIC EQUIPMENT
Different sort of electric equipment was used to control XYZ mechanism. To select appropriate tools, knowing basic about it is essential. From motor to Microcontroller, driver, wires, batteries, and breadboard.
3.3.1 Microcontroller
A microcontroller is a small computer on a single integrated circuit. It functions as artificial brain of the system. Microcontrollers are used in self-controlled products and devices, such as automotive motor control systems, implantable medical devices, remote controls, office machines, appliances, power tools, toys and many more gadgets. A microcontroller holds one or multiple CPUs (Central Processing Unit) along with memory and programmable input/output peripherals. Microcontroller process the given input and make other components to perform certain task. Such as activating and deactivating motor supply. Turning on and off different devices and monitoring system and perform given instructions on certain conditions.

Figure 29. Elegoo UNO R3 Microcontroller
Here, figure 29 shows Elegoo UNO R3 Microcontroller which was used in XYZ Mechanism. The Uno is a microcontroller board based on the ATmega328. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz ceramic resonator, a USB connection, a power jack, an ICSP header, and a reset button.
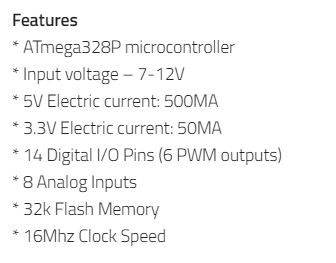
Figure 30. UNO Features list
Figure 30 shows technical specification of UNO. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started. There are different types of microcontroller for various purposes. UNO is basic microcontroller to control and operate simple and primary instructions. There so many options available to choose from for variety of purposes like very basic UNO, Raspberry Pi, Feather, Nano
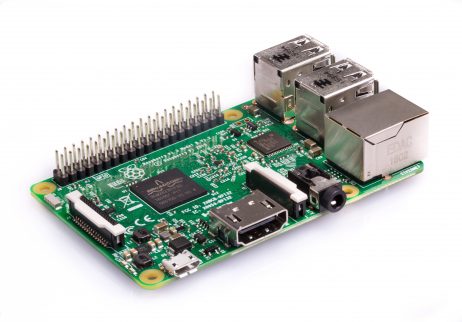
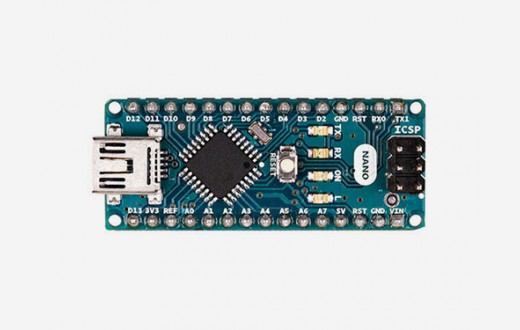
Figure 31. Various Microcontroller []
3.3.2 Driver
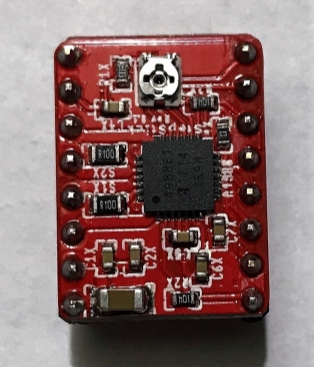

Figure 32(a). Stepper Motor Driver Front Figure 32(b). Stepper Motor Driver Rear
Here, Figure 32 Shows images of stepper motor driver. Stepper motors need driver to work. Here Elegoo Stepstick Stepper Motor Driver Module A4988 has been used. Stepper motor drivers alter pulse signals from the UNO into motor movement to achieve specific positioning.The A4988 is a wide-ranging microstepping motor driver with integral translator for easy process. It is designed to operate bipolar stepper motors in full, half, quarter, and eighth modes, with an output capacity of up to 35 V and ±2 A. The A4988 contains a fixed off-time current controller which has the ability to function in Slow or Mixed decay modes.
To maintain the heat and temprature on surface, various type of heat sinks are used. Which increase surface area and fasten the heat dissipation. Evantually the temprature remains low and under safe temprature to work.
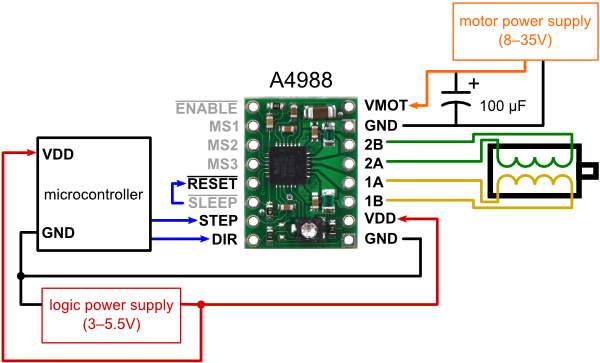
Figure 33. Stepper Motor Driver Circuit setup.
Above figure shows wiring setup of A4988 with microcontroller, power supply, and 4 wire stepper motor. Right side of driver have voltage and ground connection. 2B and 2A are connect with one coil in motor and 1A and 1B are connected to another coil. VDD and GND connected to microcontroller. The small circular object at the bottom on driver is potentiometer. It controls current rating. Two times current rating indicate voltage output. Different microcontroller required different drivers.
3.3.3 Breadboard
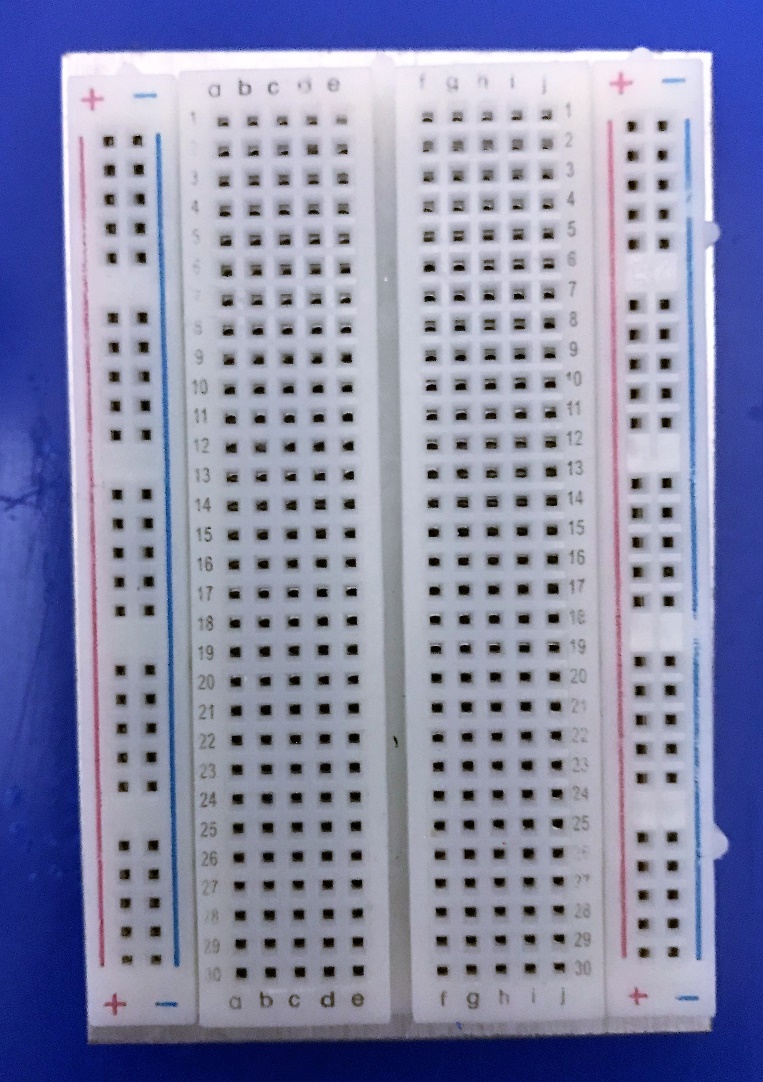
Figure 34. Breadboard
A breadboard is a solderless device for temporary prototype with electronics and test circuit designs. Most electronic components in electronic circuits can be interconnected by inserting their leads or terminals into the holes and then making connections through wires where appropriate. The breadboard has strips of metal underneath the board and connect the holes on the top of the board. The metal strips are laid out as shown below. Note that the top and bottom rows of holes are connected horizontally and split in the middle while the remaining holes are connected vertically.
3.3.4 INTRODUCTION TO MOTOR
There are serval types of motors for different purposes. Basically, there are two types of motors, i.) AC Motors, ii.) DC Motors.
- AC Motors: It is very flexible in multiple features like speed control and have a wide installed base with comparing to DC motors. It requires less power on start and acceleration can be moderated. Even functioning speed and starting current can be monitored and measured. Torque limits can be also set to requirement.
There are subtypes of AC motors, synchronous and Induction. Induction motors are also known as Asynchronous and sub divided in single phase and three phases.
- DC Motors: It was the primary kind of motor broadly utilized. DC motors are cheaper to set up to compare to AC motors. On the other hand, DC motors demands more maintenance than AC motors and it consumes more power than AC motors. Speed is controllable by inputting different magnitude of voltage. There is various choice for voltage but commonly 12V and 24V are most widespread. DC motors are installation friendly and offers wide range of control over speed. Motor operation such as starting, stopping, reversing, and accelerating are more time sensitive and accurate. Main advantage about DC motors is its high starting torque, which can be useful in operation like CNC. It is broadly utilized from minor tools and applications, through to power-driven automobiles, elevators & cranes.
DC motors are classified and Brushless and Brushed at primary identification and Brushed DC motors are sub categorized as series wound, shunt wound, compound wound, permanent magnet.
For XYZ Mechanism, after considering all possibility stepper motor was proper fit. Stepper motors have high precision and have high torque. With microcontroller and stepper motor driver, it can be controlled exactly per requirement. Stepper motors have wide range of selection option from step angle, torque rating, current rating, and number of phase. To rotate plate and gear assembly NEMA (National Electrical Manufacturers Association) 17 was selected.
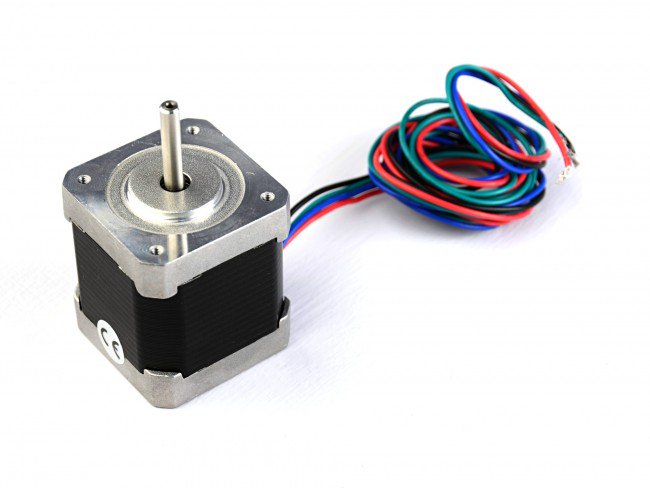
Figure 35. NEMA 17 Stepper Motor 26Ncm(36.8oz.in) 12V 0.4A.
NEMA 17 has enough holding torque to operate and withstand external forces. Motor consumes 400 mA Current. It is compatible with UNO and A4988. To connect everything, a breadboard and jumper cable was used. Entire setup was powered by wall adapter.
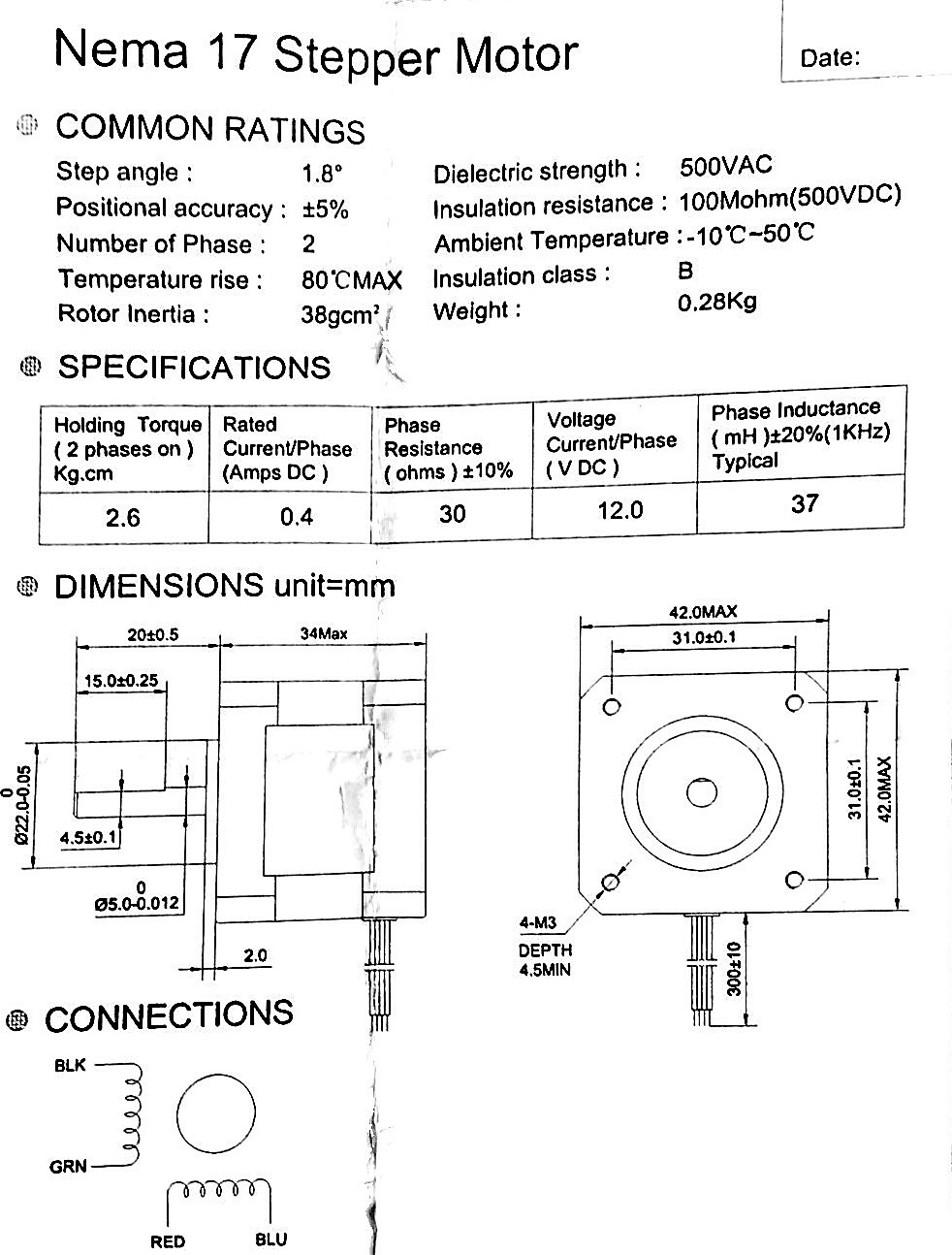
Figure 35. NEMA 17 Stepper Motor datasheet
Stepper motors have a different size of gear inside it with certain number of teeth. Ratio of 360° to number of teeth indicates the step angle. Stepper motors have NEMA 17 has 1.8° step angle.
Step angle° =
360°Number of teeth
3.4 Calculation
Solar trackers track sun whole day, in tracking, accuracy is utmost requirement. Plate rotate a certain amount of degrees to keep perpendicular to sun. For precise rotation of plate there are certain factors that needs to be considered which are i.) Worm to worm wheel reduction ratio ii.) Stepper motor step angle iii.) Motor’s positioning accuracy
- Worm to worm wheel reduction ratio: Worm gear set are used to reduce speed from driver side to driven side. Each round on worm move one tooth on worm wheel. So, number of teeth on wheel indicates the reduction ratio. If worm wheel has 40 teeth, so the reduction ratio will be 40:1. So, 360° on worm will rotate
36040= 9° on worm wheel which is 1 tooth.
In this case 30:1 reduction ratio has been selected. Which means on every 360° of worm, worm wheel will rotate
36030= 12° on worm wheel. And 30 rotations on worm will rotate 1 rotation of worm wheel.
- Stepper Motor Step angle: Stepper motors have a gear with number of teeth. Similarly, the ratio of 360° to number of teeth is called step angle. Step angle varies from motor to motor. Its depends on the motor application and purpose. It ranges widely from 0.088° to 18°. So, in case if motor have gear with 100 teeth so Step angle will be
360100
= 3.6°.
In this case stepper motor have step angle of 1.8° which means gear have 200 teeth.
Step angle
360200= 1.8°.
REFERENCES
[1] Dhanabal, Bharathi, Ranjitha, Ponni, Deepthi, Mageshkannan. Comparison of Efficiencies of Solar Tracker systems with static panel Single-Axis Tracking System and Dual-Axis Tracking System with Fixed Mount. International Journal of Engineering and Technology (IJET). Vol 5 No 2 Apr-May 2013.
[2] Gagari Deb and Arijit Bardha Roy. Use of Solar Tracking System for Extracting Solar Energy– International Journal of Computer and Electrical Engineering, Vol.4, No.1, February 2012.
[3] Qi-Xun Zhang, Hai-Ye Yu, Qiu-Yuan Zhang, Zhong-Yuan Zhang, Cheng-Hui Shao and Di Yang. A Solar Automatic Tracking System that Generates Power for Lighting Greenhouses, Energies – Open Access Energy Research, Engineering and Policy Journal, July 2015.
[4] J. Rizk, and Y. Chaiko. Solar Tracking System: More Efficient Use of Solar Panels-International Journal of Electrical, Computer, Energetic, Electronic and Communication Engineering Vol:2, No:5, 2008.
[5] S. Ghodke, M. Vasant Rajole, D. Pagar, M. Popat Makone And Prof. M. Kumar. Energy Efficient Solar System, – Multidisciplinary Journal of Research in Engineering and Technology, Volume 1, Issue 1. April 2014.
Figure 30 Stepper motor driver diagram https://www.pololu.com/product/1182 [Access: October
2017]
Fig 31 [1] https://www.raspberrypi.org/products/raspberry-pi-3-model-b/
[2] https://store.arduino.cc/usa/arduino-nano
Fig 35 https://core-electronics.com.au/lulzbot-nema-17-stepper-motor.html
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


Related Content
All TagsContent relating to: "Sustainability"
Sustainability generally relates to humanity living in a way that is not damaging to the environment, ensuring harmony between civilisation and the Earth's biosphere.
Related Articles

DMCA / Removal Request
If you are the original writer of this dissertation and no longer wish to have your work published on the UKDiss.com website then please: