Development of a 3D Printed Robotic Limb for Prosthetics
Info: 7259 words (29 pages) Dissertation
Published: 9th Dec 2019
Tagged: DesignEngineering
In this project a 3D designed myoelectric prosthetic limb will be developed. The arm will be electronically stimulated, and the user will control the arm by flexing their muscles. An amputee or a person born without a limb can use a bionic arm to replace some of the functions of a human arm. There are many advanced designs on the market, however they are very expensive. Over the years, 3D printing has developed greatly, and it is less expensive to design and print a bionic arm by using cheap materials such as PLA. A 3D printed bionic arm would be able to function the basics and will be useful to many who cannot afford purchasing a custom limb like bebionic.
Contents
Ways to attach a prosthetic to the body
Introduction
Some people are born without a limb or become an amputee. The BMC Musculoskeletal Disorders published a study that found that 21.1 in 10,000 babies were born with a missing or deformed limb between 1981 and 2010 in the Netherlands [https://www.ncbi.nlm.nih.gov/pmc/articles/PMC3840683/ ]. In the USA, there are approximetaly 2.1 million people living with limb loss, this number is expected to double by 2050. Around 185,000 people have an amputation each year. https://accessprosthetics.com/15-limb-loss-statistics-may-surprise/]. In this project, the upper limb amputation will be mostly discussed. There are many different types or upper limb amputations for example, Partial hand, Metacarpal Amputation, Wrist disarticulation, transradial amputation and so on. Each of these amputations have a corresponding prosthetic. The transradial amputation (Below elbow amputation) will be focused on in this project. [http://www.limbless-association.org/images/Types_of_Amputation.pdf].
A bionic arm can replace some of the essential and basic functions of a human arm. Recently, there has been a great advancement in prosthetic devices. Prosthetic devices have become more practical and useful to users. There are numerous amounts of great and accurate designs in the prosthetics industry that give a better quality of life for people who are in need of an artificial device to replace a missing body part. Such advanced devices could cost thousands due to their complexity. Therefore, the aim of this project is to design and develop an affordable bionic arm that is able to perform the basic functions of a human hand. The use of 3D printing will be made to produce the mechanical components of the arm.
WHAT FIELD RELATED TO THIS?. Several different engineering fields. Appro
Human hand
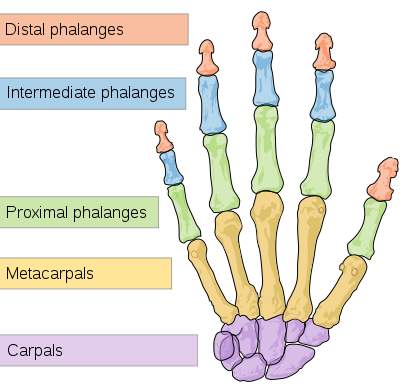
The human hand has 27 bones, more than 30 different muscles and over 100 names ligaments, nerves and arteries. Bionic arms try to imitate some of the functions of the human body and try to replace the functionality to a person missing an arm. However, no current bionic arm is able to replace the dexterity, flexibility and fluidity of the human hand. [1]
[2] Europen Commission community research, Cognitive Robotic Systems. DEXMART. DEXterous and autonomous dual-arm/hand robotic manipulation with sMART sensory-motor skills: A bridge from natural to artificial cognition. February 2, 2009 [3] Tim Taylor. Muscles of the Hand and Wrist. Inner Body org. http://www.innerbody.com/image_skel13/ligm27.html#full-description [4] Hands Facts and Tivia. The electronic textbook of hand surgery.
http://www.eatonhand.com/hw/facts.htm
https://en.wikipedia.org/wiki/Hand#/media/File:Scheme_human_hand_bones-en.svg
Past prosthetics

This prosthetic toe dates back to between 950 and 710 B.C.
KENNETH GARRETT/GETTY IMAGES
https://science.howstuffworks.com/prosthetic-limb1.htm
Researchers in Cairo discovered an artificial body part which was believed to be the oldest documented prosthetic. The prosthetic toe (figure) was produced using wood and leather. The prosthetic was found with mummified remains of an Egyptian aristocrat. This sort of prosthetic is called a passive prosthetic, which are simple and do not move. Passive prosthetics aim to restore the cosmetic appearance and basic functionally to the amputee. This discovery is a good example of much prosthetics have changed today when comparing it with history.
Prosthetic devices have always been constructed with basic materials such as metal and leather. However, in recent times there more the types of different materials used for prosthetics. For example, plastics (Polyethylene, Polypropylene, Acrylics, and Polyurethane) and Lightweight metals: such as Titanium and aluminium, composites (carbon fibres), are more popular because of their lightweight which is more convenient for amputee.
https://www.businessinsider.com/the-evolution-of-prosthetic-technology-2014-8?IR=T

An artificial hand from the 16th century contains metal casing that wraps around the stump of a forearm, held on by metal or leather straps. The user could flex his or her fingers at the large knuckle joint, which did not allow much other movement of individual fingers.
http://broughttolife.sciencemuseum.org.uk/broughttolife/objects/display?id=92612
Upper-extremity prostheses
There are many different types or upper limb amputations for example, Partial hand, Metacarpal Amputation, Wrist disarticulation, transradial amputation, full hand, and partial finger. Upper limb prosthetics can be three types: passive, body powered and externally powered (myogenic) devices. Passive devices are many used for cosmetic purpose or for passive tools used for specific activities. Passive devices can be static (no moving parts) or adjustable (hand opening). Even though passive devices lack active grasping, they can be used for bimanual tasks that need to support an object or got gestures in social interaction. From research it has been discovered that a third of the amputees that have missing limbs worldwide use passive prosthetic hand. Body powered limbs work due to a harness and a cable attached around the opposite shoulder of the limbless arm. Myoelectric arms work by sensing via electrodes when the muscles of the upper arm move (depending the level of amputation) these signals obtained cause the artificial hand to open or close.
Prosthetic in Industry
There are many prosthetic arms on the market such as the Bebionic, iLimb, and Hero Arm (Open Bionics). These are all are myoelectric controlled robotic arms which commercially accessible to the public. Many other prosthetic arms are developed in research labs. Usually prototypes are created to test and advance designs and ideas. Prosthetics in research are usually commonly more complicated in terms of the mechanical design, monitoring systems and control. However, commercial devices are more practical, cost effective and robust than research prosthetics. [1] Belter, Joseph T,M.S., B.S., J. L. Segil, Dollar, Aaron M, PhD,S.M., B.S. and R. F. Weir PhD. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. Journal of Rehabilitation Research and Development 50(5), pp. 599-618. 2013 [1]
Bebionic 3
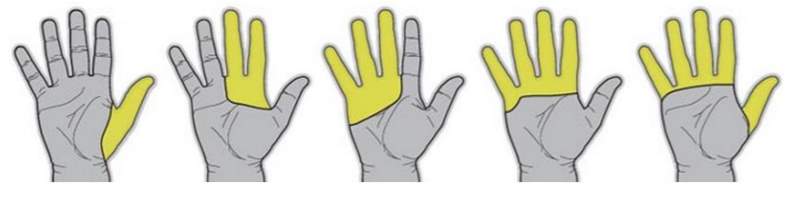
The Bebionic 3 is a commercial myoelectric hand designed to allow amputees to perform everyday tasks. The Bebionic uses a pre-defined grip system. The user has the ability to select from the 14 different grip patterns using their muscle activity around their upper forearm [5]. The user does not have control of each individual finger, but they can select a specific grip pattern and then use their muscle activity to activate the movement for that particular grip. In figure () are some of the fourteen grips of the Bebionic 3. The limitation with this grip system is that the user is not able to finely control finger positions in order to grip a specific object or carry out a task. The user has to choose a grip pattern that suits the task that needs to be completed and then actuator that grip pattern. Furthermore, the user must go through a selection of grip patterns before they can get to their desired choice. For example, when unzipping a bag, picking up an item, placing the item in the bag and then zipping the bag up would require a number of grip changes. Because of this, simple tasks like this could take some time to complete and can become quite tedious.
The thumb accounts for percent of the hand function. Therefore, the thumb design is very important in all prosthetic hands and the thumb is more complex that the other fingers. There us an adjustable thumb in the Bebionic 3 which can be placed in an non-opposed and opposite positions. Figure () shows the difference in these two positions. To change between these positions the user has to apply a force (with the other hand) to put the thumb into its position. This design has some limitation because if the user has to complete a certain task they might find it quite hard to carry out this switch. For example, if the user has to pick up an item like a water bottle, they have to change the position of the thumb (using their other hand) and then they need to go through a new grip state. The user might save time by just using their biological hand to grab the water bottle, rather than going through this process to carry out a simple task. However, despite the certain situations where the prosthesis does not have much practical benefit, prosthetic devices aim to provide much more than just functional practically. Losing a limb can decrease the confidence and the self-esteem of many amputees. Prosthetic arms can improve their mental and emotional health [18]. ] Chris Lake. Chapter 14: Partial Hand Amputation: Prosthetic Management. American Academy of Orthopaedic Surgeons




http://bebionic.com/distributor/documents/Tech_Manual_Medium_Large_Hand2.pdf

Amputation can occur at any point on the arm and each amputee has a unique case, because of this there is a difficult aspect to developing a prosthetic arm. The Bebionic 3 arm only incorporates electric motors into the palm to actuate the fingers. Because this it would be hard for an amputee that has lost some fingers but still have their palm intact to use the Bebionic 3. To overcome these cases the iLimb digits developed touch bionics integrate electric motors directly into the prosthetic fingers [6] Touch Bionics. i-limb Digits Clinician User Manual. 2014. http://www.touchbionics.com/. This design allows for the palm area to fit into a socket connection attaching the prosthetic fingers to the palm. The figure () below shows some possible amputations which would be suitable for use of the iLimb digits. iLimb designed a custom socket that fits around the users plan and depending how much digits is needed is added to the system. Just like many other prosthetic arms, the iLimb is controlled through EMG electrodes that are placed over the muscle regions in the palm. A packaged has to be worn around the user’s wrist which includes the battery and controller of the system. Due to this system the motors have to be very small in order to fit inside the fingers and this leads to the fingers to move much slower and are weaker compared with other prostheses on the market, that use larger servo motors. The iLimb does not have a active powered thumb, this means that the user has to use their biological hand to rotate the angle of the thumb. For example, while the user it eating a meal and uses their hand in a key grip mode for holding a utensil and then decides to pick up a cup, the user has to manually rotate the hand until the position is adjusted for the cylindrical grip. The iLimb does not have a force feedback for the user, and because of this it would be difficult for the user to perform precision tasks. Furthermore, as a result of the lack of force feedback, the user may drop items because they were not gripping hard enough, since there is no indication.
http://touchbionics.com/sites/default/files/image-gallery/044touchbio120313_si_2b99f2_1.jpg
Open Bionics
Open Bionics was founded in 2014 and is a UK based company that develops low-cost bionic hands. The company works with the NHS (England), Bath University, Bristol Centre for enablement, and Gyrobot on a world-first clinical trail to produce affordable bionic arms for children. Open Bionics is an open source, and anyone can access their technology. Recently, the Hero Arm, which is the world’s first medically certified, 3D printed bionic hand was introduced. The Hero Arm is a stylish multi grip bionic hand. Open Bionics mission is to make bionic limbs more accessible. Some of the features of the Hero Arm include; light weight (less than 1kg), most affordable bionic hand, long-lasting batteries, lifts up to 8kg and is able to control the speed of fingers for delicate tasks. Furthermore, for the first time, a multi-grip myoelectric is available for children ages 8 and above.
6 The prosthetic made after the arm of Adam Jensen.
The prosthetic made after the arm of Adam Jensen.
Image source: Real Game Tribu.
Prosthetic hooks

Figure 4 Hosmer 5x Prosthetic Hook (Amputee Supplies, Inc., 2010)
Prosthetic hooks were developed in the early 1900’s. They are an effective and reliable tool for an amputee to use for their daily tasks. There are many different prosthetics hooks, but they all essentially function in a similar way. There are two hook shaped metal progs which pivot at the rear section. A spring force (tension bands) holds the prongs together. They have proven to be an effective and reliable tool for amputees to use in their daily lives. Although there are several variations of prosthetic hooks, they all behave in the same general way. There are two hook shaped metal prongs which pivot at the rear section. These tension bands are made out of strong rubber bands. The users can adjust the spring force that is required for a task and they can add or remove tension bands as needed with another hand. The prong hooks can be opened by a cable which is placed under tension. The cable is then pulled by straps worn by the user which go across the torso and both shoulders. To open and close the hooks the user must flex their back or shoulders.
Current prosthetic hands
The common prosthetics that are available at the moment offer very simple and limited functionality. Most of the hands offer one action such as opening and closing. The appearance of these hands are usually very blocky and often have 3 fingers rather than 5. These hands are easier to design and build but they can not perform much tasks that the user wishes to carry out.

Ways to attach a prosthetic to the body
Two ways to connect a prosthetic to the body is using the socket design and osteointegration. When pressure is applied on damaged soft tissue for a long period an amputee might experience pain, swelling, blisters, skin irritations, oedema and restriction of blood flow. [19] The socket design is used to prevent such problems and will give the user a comfortable and hygienic experience while distributing the weight of the bionic arm in the best way. The socket design can be self-suspending, suction fitted or secured by harnesses to the user. Comfort and weight distribution can be also improved by providing extra support such as prosthetic sock, inflatable air pockets or reducing the density and stiffness at a sensitive area, all of these can act as padding. [17,19]
The process of osteointegration is to permanently integrate a non-biological component like a prosthetic with a human bone. A titanium stud is screwed in the bone of the leg or the arm at the amputation site. After some time, the bone and titanium will fuse together and create a firm anchor point for the prosthetic to attach. Osteointegration is not a very common practice, however it has many benefits such as having a strong anchor point and the soft tissue does not need to bear the weight of the prosthesis. This process does not cause skin and blood flow issues that is caused by the socket.
Artificial tendon design
artificial tendon design was chosen. As seen in the literature reviews of the Shadow Hand, UB Hand and InMoov; artificial tendons are a viable way of actuating bionic hands. The tendons can be any high strength line which does not stretch when tensioned. These lines connect to the fingers and are tensioned by motors in the forearm. Pulling on the tendons cause the fingers to open and close. The electric motors driving these tendons must be completely housed inside the device in order to make it portable and attachable to an amputee. Ideally we would like these motors placed as closely to the fingers as possible, however due to their relatively large size we cannot house the motors used inside the palm section. Instead the motors housed within the forearm. Shown on the following page are some early concept sketches outlining several key starting ideas. The choice to use standard servo motors to drive the tendons was made very early. Servo Motors are geared DC electric motors which can be controlled to rotate to specific angular positions.
User control
There are many ways to control the device. Electromyography sensing implanted myoelectric sensors and brain-controlled interface are all different ways of user controls. When muscles contract, myoelectric signals are released, and they are electrical pulses. Electrodes can be used of the skin of the user to detect small myoelectric signals and these signals can be used to control the device of prosthesis. There are many problems with using surface EMG techniques which shall be discussed later and some solutions to these issues will also be discussed. [22]
Another way for the user to control the device is by using implanted myoelectric sensors (IMES). Through a surgical procedure IMES are inserted directly into specific muscles. This allows the signals to be more distinguishable and will control the device more accurately. The user will have much more control over the device. [25]
The most recent and advanced way of control is the brain-controlled interface which is researched and developed by DARPA [27] https://en.wikipedia.org/wiki/Brain%E2%80%93computer_interface
On the surface of the brain, two sensor arrays are placed through a surgical procedure and they are wired to two pedestals embedded in the skull. Users that have this technology implanted have the ability to control a bionic arm in a 3D space and can open and close the hand, by using their thoughts alone.
InMoov
Gael Langevin designed the InMoov hand and forearm which will be adopted as the prototype prosthesis design for this project. Open-source libraries were used to interface the many project modules. The InMoove fingers and the thumb only gave one degree of freedom, this limits the dexterity of the hand. But this design is a simple solution which has many benefits over other bionic arms because of the low cost and fast manufacturing process of 3D printing.

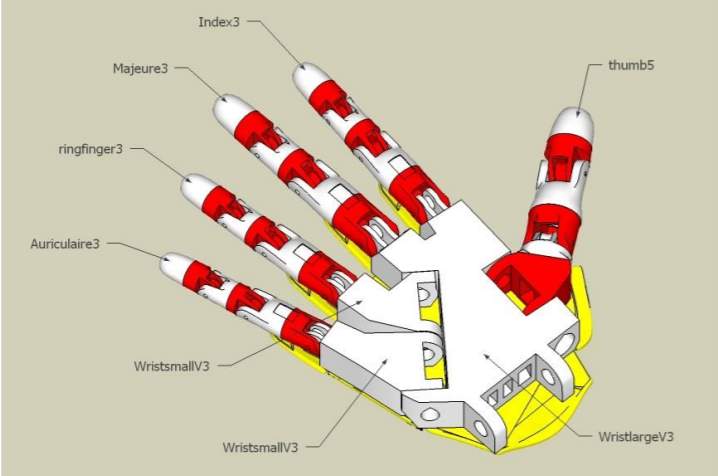
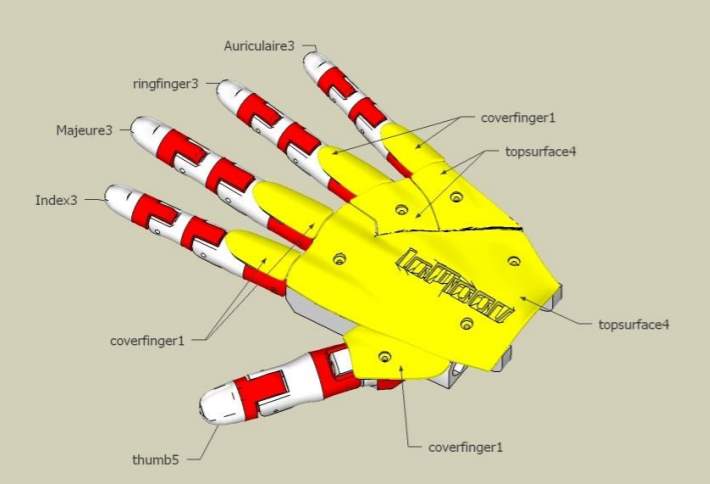
Over the past couple of years developing 3D printed bionic limbs has become quite popular. InMoov is an independently run project developing a life like humanoid robot from 3D printing technology. The entire project is open source and provides great mechanical design insight into producing 3D printed robotic body parts [20]. The open source nature of this project allows the public to access computer aided designs and follow step by step guides on how to 3D print and assemble this system. The InMoov fingers are controlled by tendons actuated through servo motors placed in the forearm. The InMoov fingers (including the thumb) only have a single degree of freedom which limits the dexterity of the hand. However, this is a simple solution which has a great advantage over other anthropomorphic hands which is that this design is low cost and easily manufactured through 3D printing.
3D Printed Bionic Arms Over the past couple of years developing 3D printed bionic limbs has become quite popular. InMoov is an independently run project developing a life like humanoid robot from 3D printing technology. The entire project is open source and provides great mechanical design insight into producing 3D printed robotic body parts [20].
The InMoov fingers (including the thumb) only have a single degree of freedom which limits the dexterity of the hand. However, this is a simple solution which has a great advantage over other anthropomorphic hands which is that this design is low cost and easily manufactured through 3D printing. The problem with the InMoov hand is that the Servos take up the entire forearm leaving no room for it to be attached to a stump between the elbow and wrist.
Cura
Cura is an open source 3D printer slicing software created by David Braam. Ultimaker which is a 3D printer manufacturing company employed David to maintain the software. Cura will be used throughout this project to slice the files into layers and to generate the G-code which will be then sent to the 3D printer for printing. Cura supports many printers such as all of the Ultimaker printers and many others. Cura can also be customised to support printers that are not listed in the software. This application will be very useful throughout this project.
https://www.revolvy.com/topic/Ultimaker
https://www.revolvy.com/topic/WorleyPars
https://www.sciencedirect.com/science/ar
Microcontrollers
A microcontroller (MCU) is a small computer and is an example of an embedded system, they are very cheap and require low power. They can be used to perform a single task within one application. All microcontrollers contain a central processing unit (CPU) to carry out the tasks, a random-access memory (RAM) to store the variables, input/output ports, processing core, and peripherals such as pulsed width modulation (PWM), timers, and clocks. MCU’s have an input device to retrieve the input and an output device to display the output. Microcontrollers can be used for a numerous embedded applications specifically automatically controlled devices including appliances and implantable medical devices. They are typically programmed using features from the programming languages C and C++.
Arduino
Arduino is an open source electronics platform; it has been a part many of projects all over the world because of simplicity for beginners and flexibility for advanced users. There are many microcontroller platforms on the market, but Arduino is preferred because it is inexpensive and ability to run on various platforms. It is simple to use and easy to learn how to use an Arduino. It can be programmed in the Arduino Programming Language (APL) which is similar to C/C++, because of this the language can also be expanded through libraries. For this project the Arduino UNO board will be used along with the Arduino software (IDE).
Servo Motor
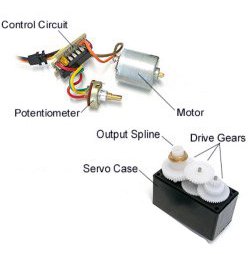
Servo motors can be used in various of ways, from helping robots to walk, to moving remote-controlled boats. Servo motors com in a range or sizes from miniature for small projects to larger ones for industrial uses. Servos are made from basic parts such as a DC motor, control circuit, and a potentiometer that is connected to the output shaft. The output shaft can be positioned in a specific angular position and sends the servo coded signals. The motors can be small and built in a control circuitry, they provide good torque for their size. As the motor rotates, the potentiometer’s resistance changes, this allows the control circuit to specifically regulate how much movement there needs to be and in which direction. When the shaft of the motor reaches a desired position, the power that is supplied to the motor is stopped. Servo motors have proportional control, which means that if the motor is close to the desired portion it will turn more slowly and if it is far for the specific position it will turn fast. Overall, servo motors are very efficient because they will only run as hard as necessary to complete the task.
 Hitec HS-322HD Standard Heavy Duty Servo
Hitec HS-322HD Standard Heavy Duty Servo
3D printing
3D printing is the process in which material joins or solidifies under computer control to produce a 3D object. 3D printing can be used for producing prototypes fast and additive manufacturing. Objects can be of any shape and can be created by using digital model data from a 3D model or from an Additive Manufacturing File (AMF). In the 1980s , additive manufacturing equipment and materials were developed and in 1981, Hideo Kodama of Nagoya Municipal Industrial Research Institute invented two additive methods for fabricating three-dimensional plastic models with photo-hardening thermoset polymer, where the UV exposure area is controlled by a mask pattern or a scanning fibre transmitter.[9
Power Supply
It is important that this system is portable and completely powered by internal sources. Using a wall power supply is fine for testing and debugging but a prosthetic arm needs to be powered by a source an amputee can easily carry around. Servo motors use a significant amount of current during operation. Disposable batteries would not be a good solution since the servos would drain power too fast meaning they would have to be replaced quite frequently. Lithium Polymer (LiPo) batteries offer a high energy density and are rechargeable. There is a trade-off between battery life and battery size. Ideally we would like the arm to be able to run for several hours without needing to be recharged. However, to achieve this, the size of the battery may become too large to be housed within the device. Figure 3.30 – EMG sensor kit & signal output 3D Printed Myoelectric Prosthetic Arm 44 Figure 3.31 – 2 Cell Lithium Polymer battery powering the device The muscle sensor kits require very little power whereas the Servos and microcontroller require a significant amount. The muscle sensor kits require two power sources to create a positive and negative voltage reference. These sensors are sensitive to input voltage spikes and require a stable power supply to generate high quality signals. For these reasons the EMG sensing boards are supplied power by two separate 9V batteries. Two disposable batteries should provide power for a substantially long time. When they do run out they can be easily and cheaply replaced. A more sophisticated electrical system could link all components to a single power source using techniques to generate a negative voltage for the EMG sensors. This would reduce the size, weight and clutter of the current power supply system.
EMG Signals
Electromyography (EMG) signals can be used for many biomedical and clinical applications. EMG signals can be used as a diagnostics tool for finding neuromuscular diseases, assessing low-back pain, kinesiology, and disorders of motor control. EMG signals are also used as a control signal for prosthetic devices such as prosthetic hands, arms, and lower limbs. The tissues of the muscles conduct electrical potentials which is similar to the way nerves do, these are called the muscle action potentials. It is the study of electrical muscle signals and it is sometimes referred as myoelectric activity. The EMG signals obtained from the muscles need further advanced methods for detection, classification, and processing. EMG signals can be used to control prosthetics, computer interaction, and human grasp recognition. It is possible to record the information in these muscle action potentials by obtaining the surface EMG.
However, there are some difficulties into acquiring accurate signals. One of the main issues of concern than influences the accuracy of the signal is the signal-to-noise-ratio (SNR). SNR means the ratio of the energy in the muscle signals to the energy in the signals of noise. Noise signals can be any electrical signals that are not part of the wanted EMG signal. The other main issue is the distortion of the signal. This means that the comparative contribution of other frequency component in the EMG signals should not be changed. Electrodes are used to acquire the EMG signals and there are two types, non-invasive and invasive electrodes. EMG signals can be obtained from the electrodes which are placed directly on the skin and the signal represents all of the muscle fibre action potentials that occur in the muscles underneath the skin. Invasive electrodes used to access the muscle fibers or the neuromuscular junction. Fine-needle electrodes or thin stainless-steel wires are inserted or implanted to obtain local recording from the fibers or neuromuscular junctions
7. K.-A. Henneberg, “Principles of electromyography,” in The Biomedical Engineering Handbook,
Thalmic Labs – Myo Armband
In order to obtain the EMG signals invasive or non-invasive electrodes have to be used and this is not wireless. However, with new technology on its way, EMG signals can be obtained using wireless devices through Bluetooth. For example, Thalmic Labs designed the Myo armband which is a gesture recognition device which can be worn on the forearm. The Myo enables the user to control technology wirelessly by using many different hand motions. The device uses EMG sensors to sense the electrical activity in the forearm muscles, It uses a set of electromyographic (EMG) sensors that sense electrical activity in the forearm muscles, combined with a gyroscope(device consisting of a wheel or disc mounted ), accelerometer ( measures acceleration) and magnetometer (measures magnetism ) to recognize gestures.
 Johnny Matheny lost his arm to cancer, but using the the Myo armband from Kitchener’s Thalmic Labs he’s able to control a prosthetic arm with his brain. (Johns Hopkins University)
Johnny Matheny lost his arm to cancer, but using the the Myo armband from Kitchener’s Thalmic Labs he’s able to control a prosthetic arm with his brain. (Johns Hopkins University)
Leap Motion
Leap Motion (an American company) manufactures a computer hardware sensor device that detects hand and finger motions as inputs, this information is then sent t a computer through a USB and then the motions can be analysed by the leap motion software using complex maths. This does not require any hand contact or touching. Leap motion can also be used to control a robotic hand, but the use might not benefit the same as the Myo Armband will benefit an amputee.

https://www.ncbi.nlm.nih.gov/pmc/articles/PMC1455479/
Project aims and objectives
The main aim of this project is to produce a prototype of a prosthetic arm. The hand would achieve the basic movements of holding an object in one or more ways. The design of the hand and forearm will be taken from ‘InMoov’ which is an open-source 3D printed robot. The control method will be either myogenic or programmed. Electrodes will be placed on the biceps for reading and these signals will be amplified and interpreted by an Arduino. Servo motors will be connected to the Arduino and which will move the servo motors which are attached to the fingers. The fingers will flex it extend depending on the EMG signals.
Method of Attack
It is difficult to produce a perfect design from scratch. There could be many solutions that could be reasonable, but many unpredicted problems could arise later on. There could be a loss of time and money when improving a first design and this approach might not be as successful. A better approach to reach the solution is to produce a prototype design like a block diagram (figure). This will allow analysation of the design and make improvements faster. Also, doing research on many other projects to see what sorts of problems there was and thinking of some possibilities to overcome that.
Block Diagram
A user flexing generates an analogue signal which is amplified, rectified and smoothed by the EMG sensor board. The microcontroller uses this analogue signal to generate a pulse width modulated signal. This drives servo motors which tension the tendons causing the fingers to curl up.

Challenges
The purpose is to develop bionic arm which can be used to benefit someone with a missing arm. Therefore, the device must be useful to an amputee. The mechanical and electrical systems need to be complex enough to at least have similar functions to a human arm and should have the right amount of dexterity to be physically advanced. The user should have an easy and natural experience when controlling the bionic arm. It will not be beneficial to the user if they are having a difficult time controlling the device. Finally, the overall cost of the device should be kept low as possible.
Types of solutions
The design can be created using a 3D CAD tool such as Fusion 360 and then 3d printing the design. However, due to the lack of time and experience the design will not be made from scratch but rather the ‘InMoov’ design will be used instead. The components of the device can be brought and assembled together. The user of the device will be able to control the bionic arm via muscular flexing detected using surface electrodes which will be placed on the skin. 3D printers permit the creation of detailed mechanical components and the components can be assembled fairly fast. Whereas constructing very complex designs using very advanced methods would be very expensive and will take longer to complete. An artificial tendon network will be used to actuate the device. Using this system will keep the costs low and create a simple system to control the fingers. Other systems such as designing a rigid joint linked system to actuate the device will be difficult to combine with 3D printing.
Material
Most of the design will be printed using PLA, with a diameter of 1.75mm. ABS could also be used but PLA was chosen due to some differences in between the materials. PLA is a biodegradable (under the correct conditions) thermoplastic which is made from renewable resources such as sugarcane or corn-starch. Whereas ABS is not biodegradable and is not made from natural resources. PLA is considered safer than ABS and is more convenient to use for 3D printing.
Project time plan
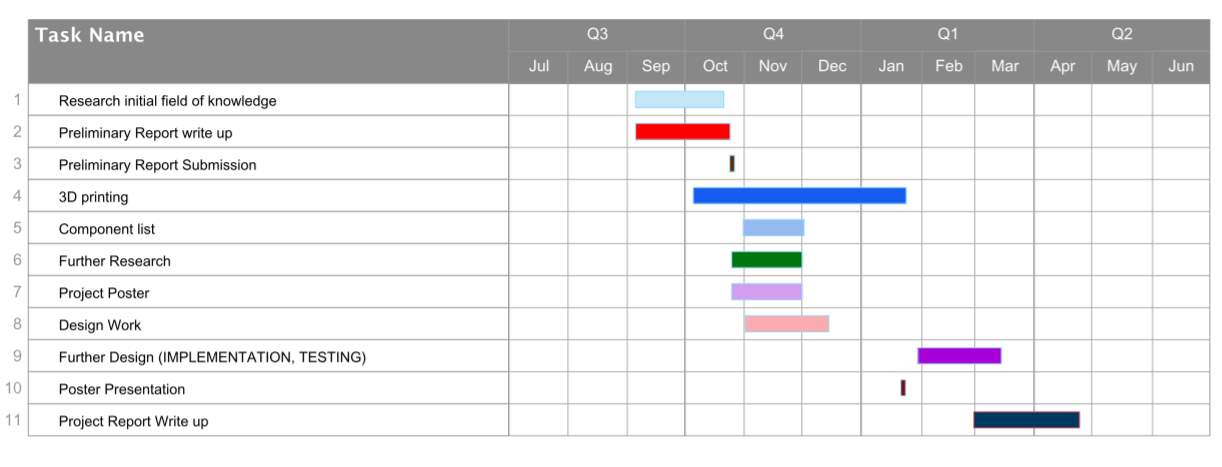
- a section describing the proposed methodology for the project work
Conclusion
In conclusion the aim this project is to 3D print a bionic arm that can move in a specific way. It is important for the hand to hold an item of choice well with a firm grip.
that can automatically detect an individual’s emotions for use in the diagnosis of patients suffering from Schizophrenia. It was found that although detecting emotions is not too difficult, it is difficult to interpret these emotions correctly, for example in an interview a person may be afraid of not being believed instead of fear of being caught, which the interviewer may assume. Many difficulties will arise in this study for example the interference of light in images and expressions and being able to locate the correct expression at the right time in a video. Further research will need to be conducted into Matlab and its capabilities to achieve the objectives.
Not more than 100 words summarising the Report
References
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


Related Content
All TagsContent relating to: "Engineering"
Engineering is the application of scientific principles and mathematics to designing and building of structures, such as bridges or buildings, roads, machines etc. and includes a range of specialised fields.
Related Articles

{kind=link}
{kind=link}
DMCA / Removal Request
If you are the original writer of this dissertation and no longer wish to have your work published on the UKDiss.com website then please: