Electric Vehicle Energy Consumption Modelling for Range Estimation
Info: 7639 words (31 pages) Dissertation
Published: 25th Jan 2022
Tagged: Engineering
1 INTRODUCTION
1.1 Project Scope
Global warming has led to more severe regulations on CO2 and pollutant emissions. In these circumstances, Hybrid Electric Vehicles (HEVs) and Electric Vehicles (EVs) have been introduced. EVs are considered as a solution to the above issue since it offers a zero emissions alternative. Besides, EVs are cheaper to recharge as electricity is cheaper than fuel. It is also possible to recover some energy from regenerative braking with EVs thanks to electric motors reversibility. Along with HEVs, it is a solution for car manufacturers to reduce the average emissions of their fleet to meet the regulations and hence avoid paying taxes.
However, the expansion in EVs usage is limited because of the limited number of electric charging stations and EVs lower range compared to Internal Combustion Engine (ICE) vehicles due to batteries lower energy density. These issues are responsible for a phenomenon called “range anxiety”. It refers to drivers’ fear to be out of energy while driving [1]. This phenomenon is more critical for EV drivers due to EVs limited range. A solution to reduce “range anxiety” is to improve driving range by increasing battery energy capacity or the number of charging stations. However, both solutions are expensive, and will not improve the confidence of EV drivers in remaining driving range (RDR) estimation.
Nowadays, vehicle on-board systems used for RDR estimation are not accurate enough as they are mainly based on vehicle historical data [2], [3], [4]. So, these systems can lead to major errors and hence cannot be fully trusted leading to “range anxiety”. Thus, another solution is to improve the algorithms implemented for RDR estimation. Some researchers have developed new methods enabling a more accurate estimation which will be discussed in Section 2 as part of a literature review.
A better EV energy consumption estimation is required for a more accurate RDR estimation. The improvement of the energy consumption estimation is the main concern of this thesis. The energy consumption is only considered between the battery and the wheels. The energy losses between the grid and the battery is not considered as it will not affect the EV energy consumption. Moreover, in this thesis, the EV energy consumption refers to the sum of the energy required to propel the vehicle, the energy used by the auxiliary systems and the losses due to the powertrain efficiency.
A reduction of “range anxiety” and a higher range are expected thanks to the above. Higher range can be achieved by giving more confidence to the drivers, enabling them to use more range since nowadays most of the drivers use only about 70% of the estimated remaining battery energy (RBE) [3].
This thesis project is undertaken in partnership with Delta Motorsport. The EV energy consumption is modelled considering an EV model built in MATLAB/Simulink based on an EV currently available in the market. The choice of this EV was made by the company involved in the project as the model will be validated against experimental data after a test performed with this EV.
1.2 Project Aims and Objectives
This thesis is aimed to develop an accurate computer based model to calculate EV energy consumption to be used for range estimation.
To achieve this aim, the following objectives are defined:
- Development of a generic EV model in MATLAB/Simulink prioritising accuracy over computation time.
- Tuning of the EV model using the EV data provided by Delta Motorsport to be representative of the EV that will be tested.
- EV model validation by comparison between simulation and experimental results. The simulation and the experiments will be performed considering the same conditions.
In Section 2, a state-of-the-art of EV modelling, EV energy consumption and range estimation methods is presented based on findings in the available literature. Section 3 describes the strategy and the methodology of the thesis project. In Section 4, the EV specifications are introduced along with the components to be modelled. Section 5 and 6 present the EV components modelling and the EV energy consumption estimation. In Section 7, the model is validated against experimental results after an experimental test performed on a drive cycle scenario. Further improvement of the EV model are performed in Section 8. Conclusions and further work are summarized in Section 9 and 10. In Section 11, the Project Planning and Organisation are presented.
2 STATE-OF-THE-ART
2.1 A Review of Electric Vehicle Modelling Methods
An EV can be modelled considering two approaches either a forward approach also called “dynamic approach” or a backward approach also called “quasi-static approach”[5]. These two approaches are presented and compared in this subsection.
2.1.1 Forward Modelling Approach
The forward modelling approach is also known as cause-effect, engine-to-wheel or rear-to-front method. The direction of calculation is the same as the direction of positive power flow, from engine-to-wheel as shown in Figure 2‑1.
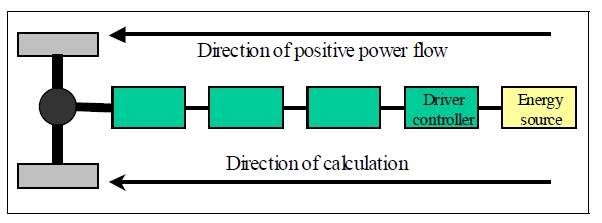
Figure 2‑1 Forward Modelling Approach [6]
This approach is based on vehicle dynamics equations and the behaviour of each powertrain components and their dynamic interaction. Moreover, a driver controller is required to control the vehicle to follow a desired speed and set the start of the calculations. The controller is implemented to model the driver that will either push the accelerator or the brake pedal to match the desired speed which enables to study the driver behaviour [6]. The controller is used as part of a feedback loop that will determine the energy required to drive the vehicle.
The advantages of such a method is that the driving speed profile does not need to be known in advance [7] and that it can be easily and rapidly used for prototyping and hardware in the loop features [8]. Besides, it is suitable to identify the interactions between components that can affect both vehicle energy consumption and performance. However, although this approach is more accurate than a backward approach, it requires higher computational effort to solve the model differential equation [6].
2.1.2 Backward Modelling Approach
The backward modelling approach is also known as effect-cause, wheel-to-engine or front-to-rear method. The direction of calculation is opposed to the direction of positive power flow, from wheel-to-engine as shown in Figure 2‑2.
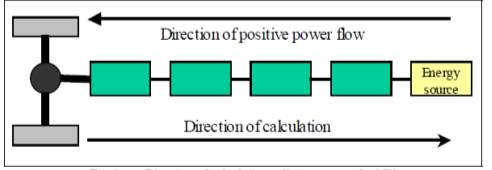
Figure 2‑2 Backward Modelling Approach [6]
This approach considers an imposed driving speed profile used to determine the forces acting on the wheels and processes backward through the powertrain. These forces refer to the resistance forces to overcome in order to drive the vehicle at the imposed speed. Thereafter, the model will calculate the speed and the torque required and finally the energy required powering the electric motor which will affect the vehicle energy consumption [6].
The advantages of this method are that no control is required and that it needs less computational effort than a forward model since the calculation of the energy demand is based on algebraic equations. Thus, the backward approach overcomes the issue related to the computational effort by assuming that the vehicle is driven at that desired speed. However, a drawback is that this approach requires that the driving speed profile is known in advance. Besides, the backward approach is less accurate than the forward approach as it does not consider some disturbances and limitation [7].
Therefore, the choice between forward and backward approaches leads to a compromise between model accuracy and computational effort. A combination of forward and backward approaches is then a good compromise. This solution is more accurate than a backward approach while faster than a forward approach. Consequently, the EV will be modelled considering an input driving speed profile and a driver model to adjust the speed output to match the input creating a feedback loop on the vehicle speed.
2.2 Factors Affecting Electric Vehicle Energy Consumption
There are several factors affecting EVs energy consumption by influencing the resistances forces to overcome to move the vehicle and the energy losses along the powertrain.
These factors can be divided in two main categories [9], [10] as shown in Figure 2‑3 :
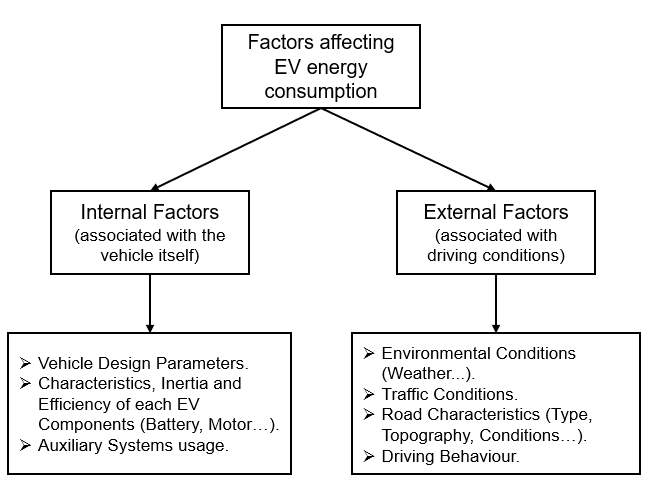
Figure 2‑3 Factors affecting EV energy consumption
The factors, shown in Figure 2‑3, must be considered in the estimation model in order to develop an accurate estimation. However, some of them are complicated to predict such as traffic conditions, road topography and driving behaviour. Consequently, they can be hard to consider for EV energy consumption estimation. Some studies have tried to study the influence of some factors on energy consumption to determine which ones are important to consider. Moure et al. (2014) have compared in [11] the impact of some factors (road slope, city driving stopping frequency, auxiliaries consumption, overtaking in highways and aggressiveness in roundabouts). Among the considered factors, it has been found that the road slope was the more influential while auxiliaries usage was the least influential factor [11]. As shown in Figure 2‑4, road slope is a major factor affecting energy consumption since considering the same driving distance the vehicle might reach or not the targeted destination depending on the road slope. In the first step of the route, the estimated range increases as the vehicle is driven on a road with a negative slope and the battery is recovering potential energy from regenerative braking. While, in the second step, the vehicle has not reached the targeted destination even if the indicated range was much higher than the required driving distance. This is due to the road positive slope which has led to a higher energy consumption than what was expected [11]. The above shows that it is particularly important to consider the road slope in the estimation and that it needs regular updates while driving to update the RDR estimation.
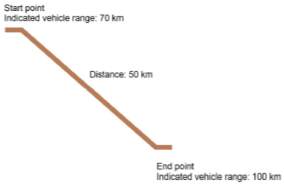
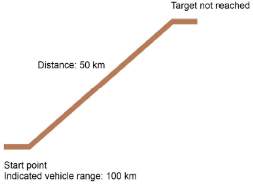
Figure 2‑4 First Step of the Route with a Negative Slope (left) and Second Step with a Positive Slope (right) [11]
Besides, Wang (2016) has put forward the idea of considering the variability of each factors with real world driving conditions to decide how they should be estimated and considered. He concludes that they should be determined separately depending on their variability [4].
As a consequence of the above, the impact of each factors must be carefully studied to find out which ones must be accurately estimated and the ones that can be assumed or even ignored.
2.3 A Review of Electric Vehicle Energy Consumption Estimation Models
Most of EV car manufacturers use an approach based on the analysis of the past average energy consumption per kilometre for future energy consumption estimation which is not accurate. This approach does not consider the changes that can occur in driving conditions [4]. Consequently, some studies are carried out to develop new algorithms for a more accurate estimation.
According to Qi et al. (2018), EV energy consumption estimation models can be classified in three main categories [9]:
- Analytical models
- Statistical models
- Computational models
Each of these categories has specific features with advantages and drawbacks that will be discussed along with the applications for energy consumption estimation models.
2.3.1 Analytical Models
Analytical models are representative of the EV behaviour and can be developed in MATLAB/Simulink by creating an EV model. They are based on fundamental theoretical equations. A model of the vehicle dynamics is built based on vehicle dynamics theory to calculate the power required at the wheels to overcome the resistances forces opposed to the vehicle motion: Aerodynamic Drag, Rolling, Inertia, Gradient and Transmission resistances [3], [12].
The power required derives from the tractive force expressed as the sum of the resistances forces above.
Hong et al. (2016) have developed an Advanced Dynamics model considering a vehicle dynamics model as explained above combined with an estimation of electric motor losses using efficiency maps provided by manufacturers. Besides, a regenerative braking model is considered as a linear function of the EV speed to model the energy recovered while braking or driving downhill. Finally, a battery State-of-Charge (SOC) estimation is performed with a battery model for EV energy consumption estimation. The model is validated against experimental data and leads to an average error around 6.85% [3].
Fiori et al. (2016) have presented in [12] the Virginia Tech Comprehensive Power-based EV Energy consumption Model (VT-CPEM), an analytical model similar to the model developed in [3]. However, VT-CPEM considers the instantaneous regenerative braking energy as a function of vehicle deceleration which is more accurate. In the case of an emergency braking, the required deceleration will be too high and hence the friction brakes will be used to brake the vehicle. Thus, even if the vehicle was driven at high speed, the energy will not be recovered as it will be dissipated in the form of heat. That is why, considering regenerative braking as a linear function of vehicle speed is only suitable for gentle braking [3]. Furthermore, the model considers the instantaneous EV speed and acceleration to provide an accurate second-by-second energy consumption estimation. Contrary to [3], this model does not only consider the motor efficiency but also the efficiency of the other EV components because the battery has to provide more energy than what is required at the wheels to overcome all the losses along the powertrain. The impact of auxiliary systems is also considered for a better estimation. VT-CPEM has demonstrated a good applicability and an average error around 5.9% with experimental data [12].
Besides, an analytical EV power estimation model has been proposed by Wu et al. (2014) in [13]. It is mainly based on the theory of vehicle dynamics and the relationships between power, force, torque, voltage and current. The model expresses the relationship between EV power, speed, acceleration and road grade. This relationship allows to determine the power required at the wheels as in the above studies. Thereafter, the power required from the motor is derived considering its efficiency. This model can be used either to estimate the instantaneous energy consumption or to predict the energy consumption of a trip for eco-route planning [13].
2.3.2 Statistical Models
Statistical models are built based on real world driving data analysis to derive empirical relationships between the different factors affecting EVs energy consumption. Different kinds of statistical models have been identified in the literature [9]:
- Regression models
- Polynomial models
- Principal Component Analysis (PCA) models
A regression model is proposed in [14] aiming at offer a better alternative for energy consumption estimation. This model is based on both historical and actual data, gathered using Global Positioning System (GPS) to collect on-road instantaneous data. Polynomial combinations of EV speed, acceleration and SOC under different operation modes are then derived from data regression analysis. Thus, the proposed model considers both the EV dynamic behaviour and the powertrain efficiency [14].
De Cauwer et al. (2015) developed three regression models using multiple linear regression (MLR) considering different level of details to measure EV energy consumption. These models are based on data extracted from experiments performed during two years with various drivers to consider different driving behaviour and different weather conditions. Thus, road characteristics, traffic conditions, driving style and environmental conditions are well considered to update the estimation models for a better accuracy [15].
The first model is based on macro trips and is used for energy consumption estimation over a trip for route planning. This model does not consider weight variation and acceleration, assuming constant EV speed. It is improved with a second model that includes acceleration data. A third model is proposed based on micro trips for instantaneous energy consumption estimation while driving. This model is more detailed and can be used to update the macro model while driving [15].
Moreover, De Cauwer et al. (2017) proposed a MLR energy consumption model based on the extraction of real world data and speed profile prediction using Neural Networks as shown in Figure 2‑5. The model is a simplified version of a physical model representing the resistances forces opposed to the vehicle motion. MLR leads to a linear representation of the energy consumption that also considers the auxiliaries consumption when they are switched on. The proposed model performs well when driving behaviour and environmental conditions vary significantly [16].
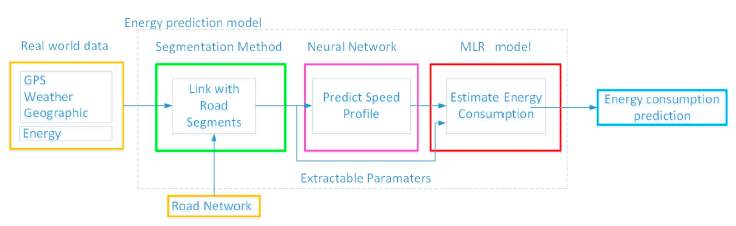
Figure 2‑5 Schematic Overview of the Energy Consumption Estimation Model [16]
Furthermore, PCA can also be used. PCA is a statistical method using an orthogonal transformation to transform a set of correlated variables into a set of new uncorrelated variables called principal components. This method is used in [9] to study separately the impact of each variables affecting EV energy consumption. Then, the EV energy consumption is estimated as a polynomial combination of each variables weighted depending on their relative importance.
2.3.3 Computational Models
There are mainly two kinds of computational models for energy consumption estimation:
- Artificial Neural Networks (ANN) based models
- Clustering based models
ANN based models determine relationships between input and output variables. In this thesis project, the input variables refer to the factors affecting the EV energy consumption which is the output variable. This kind of models is then used to estimate and predict the EV energy consumption as a function of the input factors. It determines a weight for each factors depending on their relative importance. The weights are determined using training algorithms such as Back Propagation and are adjustable depending on the evolution of the inputs with time [17].
Qi et al. (2018) have presented an ANN method to predict an EV energy consumption based on five factors, road type and grade, vehicle average speed, acceleration and deceleration as shown in Figure 2‑6 [9].
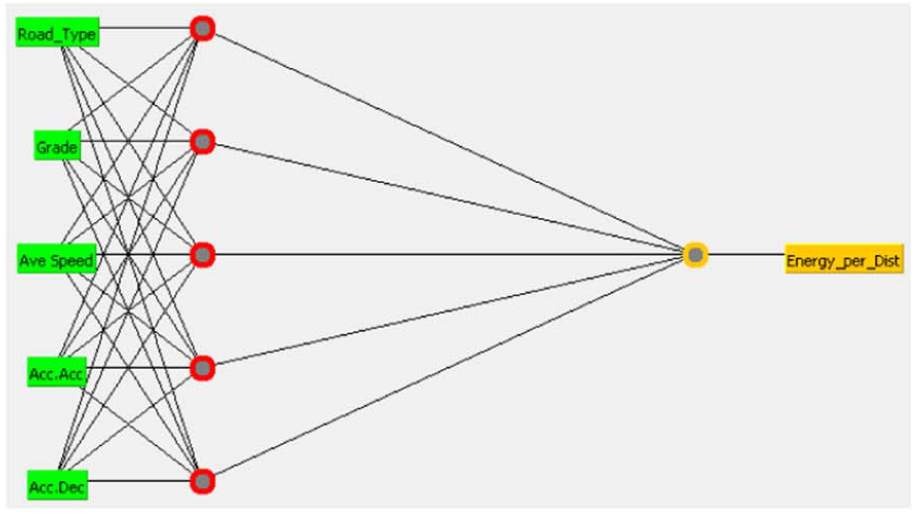
Figure 2‑6 Neural Network Structure [9]
ANN have good performance in fitting nonlinear relationships between input and output variables [9].
Another energy consumption estimation model is proposed in [18]. This model use ANN for road type classification and modelling in order to model different traffic congestion configurations and predict EVs average speed which is related to speed limits depending on road type. There is an error around 20 and 30% between estimated and measured results. Then, it is not accurate which can be partly explained by the fact that the EV average speed over a micro-trip is considered instead of the instantaneous speed that can more reflect changes in driving conditions. A micro-trip is defined as the distance between two consecutive vehicle stops. The model can be improved using GPS to enable an online recalibration of the ANN while driving [18].
ANN can also be applied for driving behaviour prediction as it is used in [19]. This paper describes a method of EV energy consumption using ANN approach for pattern classification and recognition using GPS data from smartphones. It is used to inform the driver of the RBE.It is found to be a powerful approach as it is data-driven and self-adaptative [19].
Clustering can be used to recognize similar patterns in a set of data in order to gather data in different categories with similar properties [20]. It is applicable to driving pattern recognition and driving behaviour analysis which is used to improve energy consumption estimation accuracy [21].
2.3.4 Applications of EV Energy Consumption Estimation Models
The selection of an EV energy consumption estimation approach depends on the priority between accuracy and computation time which is related to the targeted application. In general, statistical models require less computational effort than analytical models. However, they are less accurate since they are based on data analysis and probabilistic prediction while analytical models can reflect changes of EV parameters and environmental conditions as they are based on physical models [4].
Energy consumption estimation model can be used for various application:
Estimation before a trip for route planning purpose as part of an eco-routing system. For a targeted destination, it will find the route minimising the EV energy consumption to increase the EV range [9].
Estimation second-by-second to give dynamic information to the driver about the EV energy consumption to provide driving recommendations and reduce “range anxiety”.
Eco Approach and Departure (EAD) application at Signalised Intersections to provide driver behaviour recommendations when approaching signalised intersections to reduce EVs energy consumption. The optimum speed to reach the next traffic signal on a green light or to come to a stop in the most efficient way is estimated [22].
2.4 A Review of Electric Vehicle Range Estimation Models
More accurate EV range estimation algorithms are important for reducing “range anxiety” by informing drivers that their destination is reachable or not considering the RBE estimation. These algorithms can be classified into two different categories [3]:
- History-based estimation
- Model-based estimation
2.4.1 History-Based Estimation
EVs currently available in the market such as Tesla Model 3, Renault Zoe, BMW i3, and Nissan Leaf have their own range estimation approach.For Tesla Model 3, two types of range are displayed in a mobile application, either an average range based on the energy consumption over the last kilometres (10, 25 or 50km) or an instant range that considers the latest few kilometres [23]. For Renault Zoe, the RDR is estimated based on the average energy consumption over the last 200km [24]. For BMW i3, the range estimator provides recommendations to the drivers to increase the range to reach a destination by adopting an appropriate driving style [25]. For Nissan Leaf, the range is estimated based on the average energy consumption from past driving [26].
Therefore, the estimation methods implemented in currently available EVs are mainly history-based estimation as they consider the future energy consumption as the average past energy consumption over the last kilometres. Consequently, they do not consider the effects of actual driving behaviour, road and environmental conditions. History-based estimation has the advantage to be model free, but has a limited accuracy.
2.4.2 Model-Based Estimation
Model-based estimation is developed for an improved accuracy by estimating the future energy consumption and hence the RDR after predicting the future driving speed profile. This approach is divided into two steps as shown in Figure 2‑7 [3]:
- Future driving speed profile prediction considering route information, speed limits and driving pattern.
- RDR estimation with the EV energy consumption model.
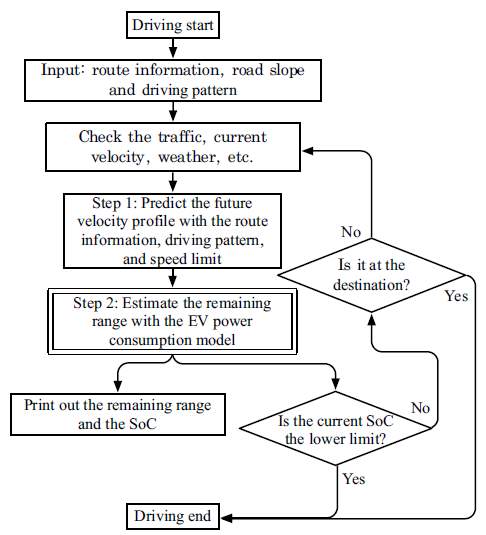
Figure 2‑7 Model-Based Approach [3]
This estimation method uses actual and predicted data in addition to historical data for an improved accuracy. Therefore, considering actual driving conditions, regular updates of the RDR estimation are possible.
Some model-based estimation methods combine two algorithms for different aims [4]:
- An offline algorithm for an estimation over a route before a trip considering the state of the factors affecting energy consumption at the time of the estimation.
- An online algorithm for an estimation while driving by updating the offline algorithm based on real-time driving conditions.
Most of existing model-based estimation methods are presented below.
2.4.2.1 Contour Positioning System (CPS)
CPS is based on road contour distance and altitude data extraction from Google Earth’s to consider the road slope changes while driving. Thereafter, the future EV energy consumption is predicted calculating the power required to overcome the resistance forces opposed to the EV motion from the extracted data. Then, the energy required from the battery is estimated considering the power required, the distance of the trip and the EV speed.
CPS provides a better estimation than history-based estimations. However, it has some limitations since EV acceleration and auxiliary loads are neglected which will lead to an underestimated EV energy consumption and hence a overestimated RDR [2].
2.4.2.2 Dynamic Range Estimator (DRE)
Contrary to CPS, DRE considers other factors [27]:
- Driver behaviour assumed as a constant aggressive driving mode to consider the most critical behaviour
- EV acceleration.
- Powertrain efficiency.
- Auxiliaries consumption when switched on.
Besides, with the aim of reducing the computational effort, DRE is divided into two estimations with different level of accuracy depending on the actual battery SOC [27]:
- A rough estimation when the SOC is above a user-defined threshold.
- A precise estimation when the SOC is below.
Another method developed in [28], also introduces a rough and a precise estimation depending on the RBE as shown in Figure 2‑8.
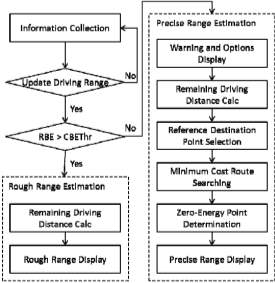
Figure 2‑8 Range Estimation Algorithm [28]
Due to the above, DRE is more accurate than CPS. However, both methods can be further improved by improving the driving behaviour model.
2.4.2.3 Model-Based Estimation using Markov Chains
Some model-based estimations use Markov Chains to predict driving profile and hence improve the RDR estimation [10], [29].
As shown in Figure 2‑9, the RDR prediction is performed in two steps. First, using a Kalman Filter, a state estimation is done to estimate the battery SOC. Subsequently, after a driving profile prediction using Markov chains, the RDR is computed as a probability density function. The RDR prediction enables to identify the location at which the EV should be recharged by estimating the future power demand from the state estimation [29].
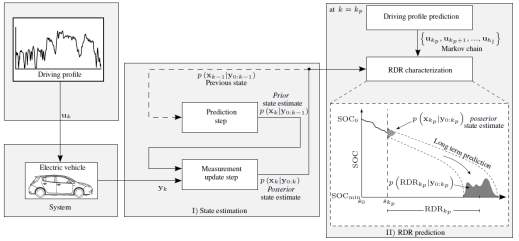
Figure 2‑9 RDR Prediction Architecture [29]
Pan et al. (2017) described a method based on driving conditions identification and prediction for RDR estimation. Considering a set of typical driving cycles, driving conditions are identified and classified in four clusters based on the recognition of recurrent patterns using a clustering algorithm. Then, using Markov chains and ANN algorithm, future driving conditions are predicted based on the identified patterns. As shown in Figure 2‑10, an energy consumption offline estimation is performed for the four identified clusters. Then, the actual driving condition is associated to the most suitable cluster. Characteristic parameters and energy consumption fuzzy rules are then used to associate the estimated energy consumption of the appropriate cluster to the real time energy consumption which is then used for RDR prediction [10].
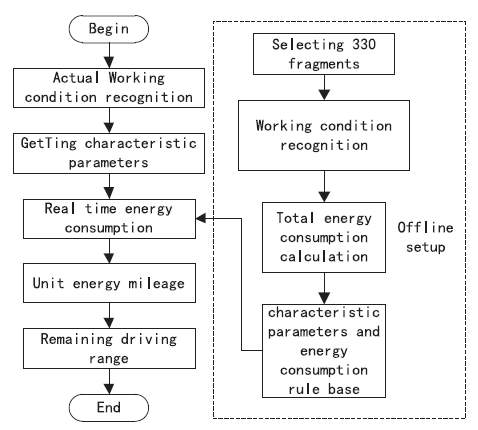
Figure 2‑10 RDR Estimation Algorithm [10]
Although, these estimation algorithms require less computational effort than physical models, they are less accurate as they are based on probability and statistics.
2.4.2.4 Estimation based on Big Data Analysis
The progress in sensors technologies has facilitated the development of range estimation methods based on big data analysis. The approach introduced in [30] is based on the collection of all data affecting range estimation. These data are divided into three categories:
- Standard data that remains constant while driving.
- Historical data related to past driving conditions.
- Real-time data that needs regular updates such as traffic conditions.
The presented model is based on the collection of the above data from different resources. For example, weather and route data are respectively extracted from “Wundergriund.com” (website proving data on temperature, wind…) and Google Map. Thereafter, data are organised and analysed to be implemented in the range estimation algorithm as shown in Figure 2‑11 [30].
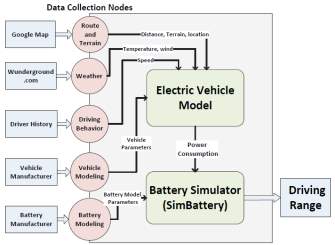
Figure 2‑11 Range Estimation Framework [30]
A range estimation method based on big data analysis is also presented in [21]. A battery cycle-life test is performed for 1600 cycles (usage around 8 years or 160,000km) to estimate the battery SOH. An EV cloud is used to collect data and provide information of the RDR to the driver along with recommendations to increase the range. Five types of data affecting range estimation are considered, route, weather, driving behaviour, EV model and battery model data [21].
The method is divided into three steps as shown in Figure 2‑12 [21]:
- Battery cycle-life modelling for SOH estimation as explained above.
- Driving patterns identification and driving behaviour analysis.
- RDR estimation based on the RBE and the factors affecting the energy consumption that are predicted through driving behaviour analysis.
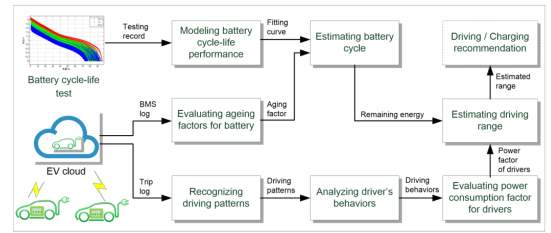
Figure 2‑12 Range Estimation Approach [21]
Big data analysis approach can be an alternative to physical models, but it requires further work to enhance its accuracy and robustness.
2.4.2.5 Probabilistic Estimation Maps
Existing approaches have been developed to display the RDR in the EV navigation system. It is displayed as a map showing the probability of reachability of the areas around the EV location at a given time [31],[32].
The approach developed in [31] considers the driver’s route preferences to reach a destination based on the past driver behaviour and other factors such as road types over the possible routes. For each possible route, the energy consumption is predicted as a random variable and the probability to reach the destination is displayed in the navigation system. This probability is derived by estimating the energy required for the trip compared to the RBE. The user can specify a threshold below which the destination is considered as unreachable as the confidence in range estimation is different for each driver.
The algorithm can also recommend the route that will minimise the energy consumption. However, the driver has the final decision on the choice of the route. Another advantage of this approach is that it considers the influence of driver behaviour and traffic flow as the energy usage is modelled directly contrary to as it is with a physical model. The algorithm’s framework is shown in Figure 2‑13 [31].
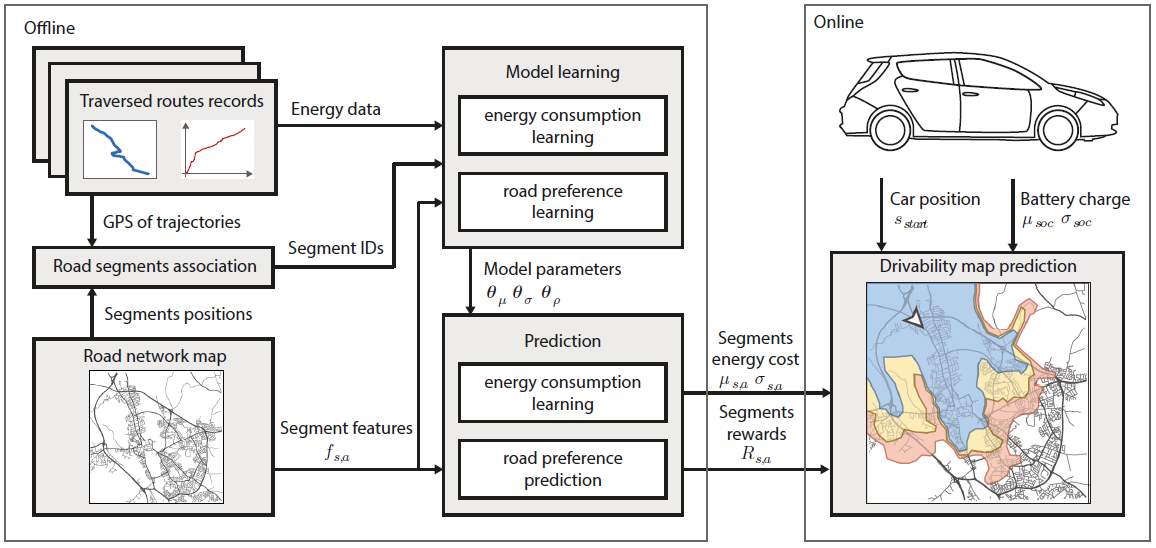
Figure 2‑13 Range Estimation Method [31]
Another dynamic range estimation is introduced in [32] as part of an Electric Vehicle Assistant (EVA). EVA is developed for smartphones and used to advice drivers about energy usage optimisation and battery charging management in order to limit “range anxiety”. It enables an interaction between the driver and the vehicle to recommend the optimum route in terms of energy consumption considering the actual EV location and the targeted destination. It is also used to inform the driver of the reachability of its targeted destination. It can provide driving strategies for energy saving to reach a destination or recommend to recharge the EV depending on the RDR and the availability of the nearest charging stations [32]. The EVA main applications and the range representation are shown in Figure 2‑14 and Figure 2‑15.
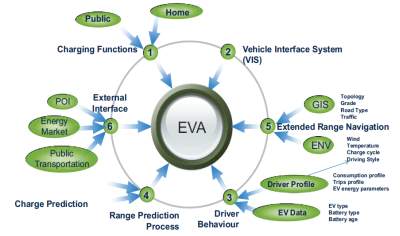
Figure 2‑14 EVA Main Applications [32]

Figure 2‑15 Range Representation [32]
EVA is appropriate to increase the EV range by recommending efficient driving strategies. However, the recommendations must be followed by the driver to make the system effective, otherwise it might be useless.
Generally, computational and statistical methods are more appropriate to be implemented in a vehicle as they require less computational effort than analytical methods based on physical models. However, they are less accurate than analytical methods. Thus, analytical method is preferred in this project as accuracy is the main issue and the issue related to computational effort can be solved using new technologies.
3 STRATEGY AND METHODOLOGY
In this project, good accuracy is prioritised over fast computation for the EV model to be built. Therefore, from the defined aims and objectives and the literature review analysis, it has been decided to consider an analytical model based on a physical model built in MATLAB/Simulink. The EV model will be built as a combination of Backward and Forward Models as it is a good compromise between accuracy and computation time.
As stated in Section 2, range estimation can be divided into two consecutive steps, future driving speed profile prediction and RDR estimation with the EV energy consumption model. However, this thesis will only focus on the establishment of a power model for energy consumption estimation. The driving profile is assumed to be known, considering driving cycles used for test homologation such as NEDC and WLTP driving cycles.
The project is divided into several tasks to achieve the aims and objectives:
- Research about EV modelling techniques.
- Research about factors affecting the EV energy consumption.
- Research about EV energy consumption modelling and estimation techniques.
- Research about EV range modelling and estimation techniques.
- Development of a generic EV model in MATLAB/Simulink.
- To this aim, the different EV components will be modelled considering for each the most promising method found in the literature.
- Research and focus on the factors affecting EV energy consumption that can be considered in the EV model.
- The input of the model will be a driving speed profile and a driver model will be built to adjust the speed output to match the input driving profile considering a feedback loop on the EV speed.
- An estimation of the energy consumed by auxiliary systems will be performed to improve the accuracy of the estimation. The efficiency of each EV components will be estimated as well.
- The model will be based on longitudinal vehicle dynamics. Lateral dynamics is neglected as legislation tests are only performed in straight lines.
- Implementation of a power model for energy consumption estimation aiming for a more accurate estimation to improve vehicle RDR estimation.
- Tuning of the generic EV model using the EV data provided by Delta Motorsport.
- First validation of the EV model based on the comparison between the estimated EV range values from simulation results and the published range values from literature for typical driving cycles used for test homologation such as NEDC and WLTP driving cycles.
- Experimental tests on a drive cycle scenario will be performed in Delta Motorsport facilities with the EV considered in this project.
- Simulation results analysis and EV model validation based on the comparison between simulation and experimental results considering the same conditions.
- Model improvement for matching the experimental results and hence improving the model accuracy.
REFERENCES
[1] Nilsson, M. (2011) ELECTRIC VEHICLES THE PHENOMENON OF RANGE ANXIETY. Available at: https://cordis.europa.eu/docs/projects/cnect/5/249105/080/deliverables/001-ThephenomenonofrangeanxietyELVIRE.pdf.
[2] Chew, K. W. and Yong, Y. R. (2016) ‘Effectiveness Comparison of Range Estimator for Battery Electric Vehicles’, Advances in Automobile Engineering. doi: 10.1007/978-981-10-0557-2.
[3] Hong, J., Park, S. and Chang, N. (2016) ‘Accurate remaining range estimation for Electric vehicles’, Proceedings of the Asia and South Pacific Design Automation Conference, ASP-DAC. IEEE, 25–28–Janu, pp. 781–786. doi: 10.1109/ASPDAC.2016.7428106.
[4] Jiquan Wang (2016) Battery electric vehicle energy consumption modelling, testing and prediction : a practical case study. Eindhoven: Technische Universiteit Eindhoven. doi: 10.1111/nhs.12017.
[5] Luigi Mapelli, F. and Tarsitano, D. (2012) ‘Modeling of Full Electric and Hybrid Electric Vehicles’, New Generation of Electric Vehicles, pp. 207–236. doi: 10.5772/53570.
[6] van Mierlo, J., Maggetto, G. and van den Bossche, P. (2004) ‘Simulation methodologies for innovative vehicle drive systems’. Available at: http://etec.vub.ac.be/publications/A71712.pdf.
[7] Horrein, L., Bouscayrol, A., Delarue, P., Verhille, J. N. and Mayet, C. (2012) Forward and backward simulations of a power propulsion system, IFAC Proceedings Volumes (IFAC-PapersOnline). IFAC. doi: 10.3182/20120902-4-FR-2032.00078.
[8] Hauer, K. H. and Moore, R. M. (2003) ‘Fuel Cell Vehicle Simulation– Part 1: Benchmarking Available Fuel Cell Vehicle Simulation Tools’, Fuel Cells, 3(3), pp. 84–94. doi: 10.1002/fuce.200332102.
[9] Qi, X., Wu, G., Boriboonsomsin, K. and Barth, M. J. (2018) ‘Data-driven decomposition analysis and estimation of link-level electric vehicle energy consumption under real-world traffic conditions’, Transportation Research Part D: Transport and Environment. Elsevier, 64, pp. 36–52. doi: 10.1016/j.trd.2017.08.008.
[10] Pan, C., Dai, W., Chen, L., Chen, L. and Wang, L. (2017) ‘Driving range estimation for electric vehicles based on driving condition identification and forecast’, AIP Advances, 7(10). doi: 10.1063/1.4993945.
[11] Moure, C., Roche, M. and Mammetti, M. (2014) ‘Range estimator for electric vehicles’, 2013 World Electric Vehicle Symposium and Exhibition, EVS 2014, pp. 1–15. doi: 10.1109/EVS.2013.6914917.
[12] Fiori, C., Ahn, K. and Rakha, H. A. (2016) ‘Power-based electric vehicle energy consumption model: Model development and validation’, Applied Energy. Elsevier Ltd, 168, pp. 257–268. doi: 10.1016/j.apenergy.2016.01.097.
[13] Wu, X., Freese, D., Cabrera, A. and Kitch, W. A. (2015) ‘Electric vehicles’ energy consumption measurement and estimation’, Transportation Research Part D: Transport and Environment. Elsevier Ltd, 34, pp. 52–67. doi: 10.1016/j.trd.2014.10.007.
[14] Zhang, R. and Yao, E. (2015) ‘Electric vehicles’ energy consumption estimation with real driving condition data’, Transportation Research Part D: Transport and Environment. Elsevier Ltd, 41, pp. 177–187. doi: 10.1016/j.trd.2015.10.010.
[15] De Cauwer, C., Van Mierlo, J. and Coosemans, T. (2015) ‘Energy consumption prediction for electric vehicles based on real-world data’, Energies, 8(8), pp. 8573–8593. doi: 10.3390/en8088573.
[16] De Cauwer, C., Verbeke, W., Coosemans, T., Faid, S. and Van Mierlo, J. (2017) ‘A data-driven method for energy consumption prediction and energy-efficient routing of electric vehicles in real-world conditions’, Energies, 10(5). doi: 10.3390/en10050608.
[17] Kriesel, D. (2007) A brief Introduction on Neural Networks, Springer-Verlag, Berlin. doi: 10.1016/S0140-6736(95)92880-4.
[18] Shankar, R. and Marco, J. (2013) ‘Method for estimating the energy consumption of electric vehicles and plug-in hybrid electric vehicles under real-world driving conditions’, IET Intelligent Transport Systems, 7(1), pp. 138–150. doi: 10.1049/iet-its.2012.0114.
[19] Diaz Alvarez, A., Serradilla Garcia, F., Naranjo, J. E., Anaya, J. J. and Jimenez, F. (2014) ‘Modeling the driving behavior of electric vehicles using smartphones and neural networks’, IEEE Intelligent Transportation Systems Magazine, 6(3), pp. 44–53. doi: 10.1109/MITS.2014.2322651.
[20] Saurav, K. (2016) An Introduction to Clustering and different methods of clustering, Analytics Vidhya. Available at: https://www.analyticsvidhya.com/blog/2016/11/an-introduction-to-clustering-and-different-methods-of-clustering/ (Accessed: 26 April 2019).
[21] Lee, C. H. and Wu, C. H. (2015) ‘A Novel Big Data Modeling Method for Improving Driving Range Estimation of EVs’, IEEE Access. IEEE, 3, pp. 1980–1993. doi: 10.1109/ACCESS.2015.2492923.
[22] Amstrong, C. (2015) Eco-Approach and Departure at Signalized Intersections. Available at: https://rosap.ntl.bts.gov/view/dot/34781/dot_34781_DS1.pdf?
[23] Tesla (2017) ‘Model 3 Owner’s Manual’, p. 61. Available at: https://www.tesla.com/content/dam/tesla/Ownership/Own/Model 3 Owners Manual.pdf.
[24] Renault (2018) ‘Renault Zoe Vehicle User Manual’, p. 1.68 (74/226). Available at: https://carmanuals2.com/get/renault-zoe-2018-owner-s-manual-112259.
[25] BMW (2015) ‘THE BMW i3. OWNER’S MANUAL.’, (01), p. 32. Available at: https://carmanuals2.com/get/bmw-i3-2015-owner-s-manual-63429.
[26] Nissan (2018) ‘2019 Leaf OWNER’S MANUAL’, p. 2–10 (169/578). Available at: https://www.nissan.ca/content/dam/nissan/ca/owners/manuals/LEAF/2019-Nissan-LEAF.pdf.
[27] Wai, C. K., Rong, Y. Y. and Morris, S. (2015) ‘Simulation of a distance estimator for battery electric vehicle’, Alexandria Engineering Journal. Faculty of Engineering, Alexandria University, 54(3), pp. 359–371. doi: 10.1016/j.aej.2015.04.008.
[28] Zhang, Y., Wang, W., Kobayashi, Y. and Shirai, K. (2012) ‘Remaining driving range estimation of electric vehicle’, 2012 IEEE International Electric Vehicle Conference, IEVC 2012. IEEE, pp. 1–7. doi: 10.1109/IEVC.2012.6183172.
[29] Oliva, J., Weihrauch, C. and Bertram, T. (2013) ‘A Model-Based Approach for Predicting the Remaining Driving Range in Electric Vehicles’, Annual Conference of the Prognostics and Health Management Society, pp. 1–11. doi: 10.1109/EVS.2013.6914989.
[30] Rahimi-Eichi, H. and Chow, M. Y. (2014) ‘Big-data framework for electric vehicle range estimation’, IECON Proceedings (Industrial Electronics Conference). IEEE, pp. 5628–5634. doi: 10.1109/IECON.2014.7049362.
[31] Ondruska, P. and Posner, I. (2014) ‘Probabilistic attainability maps: Efficiently predicting driver-specific electric vehicle range’, IEEE Intelligent Vehicles Symposium, Proceedings, pp. 1169–1174. doi: 10.1109/IVS.2014.6856572.
[32] Ferreira, J. C., Monteiro, V. and Afonso, J. L. (2014) ‘Dynamic range prediction for an electric vehicle’, 2013 World Electric Vehicle Symposium and Exhibition, EVS 2014. doi: 10.1109/EVS.2013.6914832.
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


Related Content
All TagsContent relating to: "Engineering"
Engineering is the application of scientific principles and mathematics to designing and building of structures, such as bridges or buildings, roads, machines etc. and includes a range of specialised fields.
Related Articles

DMCA / Removal Request
If you are the original writer of this dissertation and no longer wish to have your work published on the UKDiss.com website then please: