Dissertation Proposal on Biotech Wastewater System Control
Info: 7945 words (32 pages) Example Dissertation Proposal
Published: 1st Feb 2022
Tagged: Environmental StudiesTechnology
Introduction
Works performed during this thesis are at the crossroads of an important theoretical field, automation and control systems in particular, and a leading applicative sector, the biotechnology sector.
Biotechnology, according to the Organization for Economic Co-operation and Development (OECD) [12], is defined as “the application of science and technology to living organisms as well as parts, products and models thereof, to alter living or non-living materials for the production of knowledge, goods and services”. It is used by man for centuries; for example, microorganisms were used for the manufacture of food products such as bread, cheese and alcoholic beverages.
Today, biotechnology allows a manufacturer to improve its manufacturing processes, upgrading or replacing older techniques. They, also, enable to create products previously inconceivable. The introduction of biotechnology implies a significant reduction in production costs and increased product quality. All these aspects represent a real economic issue.
Biotechnology involved in several areas; including food processing and environmental protection. In breweries for example, biotechnologies have replaced the traditional techniques. Nowadays, manufacturing control and selection of yeast fermentation can provide drinks for consistent quality and taste. Introduced enzymes in detergents used to wash clothes at low temperature, without adding phosphates, thus reducing energy consumption and limiting pollution. Microorganisms are also used to degrade pollution for water treatment.
Over the last centuries, Human effects on the hydrologic cycle have been increased. In order to establish convenient environments for living as well as agricultural and industrial production, artificial recycles have been created. In addition to the necessity to live, water is used for numerous purposes, for example irrigation, transport of material and energy as well as cleaning. Whatever the purpose is, processing and/or using normally results pollution of water. Enormous amounts of water need to be treated each day, though only a fraction is actually treated. The wastewater treatment industry considered one of the largest industry in the world, in terms of treated mass of raw material.
Clean water is a valuable resource lacking in many parts of the world; especially in Africa where people have died from diseases related to water contamination (e.g. cholera). Every living thing on earth (microorganisms, plants, animals, human being and even our brain) consists mostly of water. More than 70% of the earth’s surface is covered by water, only a small part of which is suitable for either human consumption or agricultural use (approximately 0.5% of all water in the earth). Due to pollution from agriculture, households and industry reaching rivers, lakes and seas it is important for wastewater (sewage) to be properly treated in order to remove harmful substances before it reaches the environment.
During the last century, methods to treat wastewater gradually have been refined, from simple grids, and aerated ponds, to highly complex processes including many separate steps. The requirements on the water being discharged to the recipient bodies have become more demanding as the environmental awareness has increased on both individual and governmental levels. Strict requirements as well as the increased complexity of the involved processes emphasize the need for more knowledge about these processes and better control of them.
Though biotechnological applications are wide and varied but they all constitute a real economical challenge. Thus, the field of biotechnology has become one of the hottest areas in the community of automatic control experts.
The bioprocess Automation
Biological processes are complex systems that involve the growth of micro-organisms through the consumption of substrates or nutrients by imitating self-cleaning cycles found in nature. At wastewater treatment plants, this growth is only possible in the presence of favorable “environmental” conditions. By environmental conditions means the physico-chemical conditions (pH, temperature, agitation, aeration …) necessary for full activity of microorganisms. To achieve these conditions and current technical, economic and environmental requirements, it is necessary to use systems of measurement, control, supervision and monitoring. These issues are addressed in the field of Automatic.
Strict environmental and health regulations together with a demand for cost effective ways of wastewater treatment have made control technology in Wastewater Treatment Plants (WWTPs) an important priority. In WWTPs, the control system is used to supervise the inherently dynamic wastewater treatment processes from the influent wastewater through biological processes up until effluent dispersal. The introduction of a control system in these plants is expected to reduce the need for larger volumes, improve the effluent water quality, decrease the use of chemicals, save energy and operational costs. Sensors for dissolved oxygen and nutrients such as ammonium, nitrate and phosphorus have been developed and improved in recent years, thus increasing the potential for effective monitoring, automation and control of wastewater treatment plants. This assists in reaching the objective of the wastewater treatment process operation, which is to provide reliable and stable process control with highly efficient results (low concentration of substrates in the effluent wastewater) at minimum cost.
The level of automation has been risen somewhat from a very basic level in the beginning of the 1970s to approach level in parity with the complexity of the involved processes at the most modern installations. However, there is much left to do, and a lot can be learnt from other industrial fields, such as chemical process, pharmaceutical, paper and pulp industries.
In this thesis, a reliable approach to state estimation of the nonlinear dynamic model of the activated sludge process is presented, using state dependent Riccati equation and H-infinity techniques. Further, a methodology to use these techniques for nonlinear robust control of wastewater plant is discussed. The monitoring strategy is firstly to estimate the variables in the system by making use of the process model and some available observations to predict the behavior of technically inaccessible states or very expensive measured states.
Secondly to use nonlinear control theory (process model, process constraints and the objective functional) to search for optimal control signal to be used as a reference trajectory for the controller for real time process control. In this thesis, optimal control problem is solved, basing on Benchmark Simulation Model (BSM) for the purpose of future control application in real time.
The focus of the project is to together the maximum information on the state of the system and to control dissolved oxygen needed by microorganism in the ASP to grow. And because of when ammonium is oxidized to nitrate, a significant oxygen demand in the receiving water may give rise to a severe depletion of the dissolved oxygen concentration; the denitrification reaction takes place in an anaerobic environment where the bacteria responsible for denitrification respire with nitrate instead of oxygen. A nitrate control loop in the second anoxic reactor is considered. The aim of the suggested method is to efficiently control and reduce unnecessary dissolved oxygen concentration, which in turn reduces the amount of energy, required for high airflow rate and thus minimizes cost.
The specific problems of Automatic Control of bioprocess
The biotechnological process is quite large, in fact it includes several types of processes such as: fermentation for the production of chemicals with high added value (e.g. pharmaceuticals), the mass production of food and beverages (e.g. yoghurt, cheese, beer) and the biological treatment of waste, whether solids (composting), liquids (e.g. activated sludge) or gaseous (biofiltres). Industrial use of biotechnological processes has been grown considerably in recent decades for various reasons (legislative standards more stringent in the process industries, improving efficiency and quality processes, etc.). The problems caused by that industrialization are essentially the same as those encountered in any process industry and we encounter in bioprocessing, almost all of the problems discussed in Automatic. Thus, the need for processes control, supervision and monitoring systems are needed to optimize its operation, to establish better handling or to detect malfunctions. However, in industrial practice, very few facilities are equipped with such systems. Two main reasons explain this fact: the complexity of these processes and the lack of sensors in most cases, both are expensive and unreliable for online applications.
Biological processes are complex, due to the varied nature of many phenomena that take place by involving living organisms. From the Automatic point of view, these methods are characterized in general as multivariable systems, nonlinear and non-stationary [14]. In fact, modeling of these systems faces two main difficulties: first, a lack of reproducibility of experiments and inaccurate measurements which lead both difficulties regarding the choice of model structure, but also difficulties related to identification procedures. Secondly, there are also difficulties in the validation phase of the models which the set of parameters are specifically variable over time [5]. These variations may be the consequence of metabolic changes in biomass or unobservable and unpredictable genetic modification in a macroscopic level.
Because living organisms are the heart of these processes, so mathematical modeling of these processes is a difficult task. Indeed, models are central to the development of control systems, so the on line control becomes also complex.
A second major difficulty is the almost systematic absence of sensors to access necessary measures to know the internal operation of biological processes [19]. It is here that the main limitation is delaying full automation of biotechnological processes. Most of the key variables of these systems (concentrations of biomass, substrates and products) can be only measured by using laboratory tests; the duration, cost and especially the procedure reduce the frequency and measurement automation. Thus most of the existing control strategies are often limited to the indirect control of biotechnological processes by control loops of environmental variables such as dissolved oxygen concentration, temperature, liquid flow rates and gas and pH, etc…[5]. However, the problem of sensors receives special attention increasingly significant over the years. Nevertheless, although a significant effort has been made in research centers for the development and the reliability of sensors, transfer them to industry, local government remains nascent and has yet to develop in the coming years.
On sensors, regardless solutions, we always reveal two types of systems: in situ sensors, implanted directly in the biological reactors and online sensors, located on a special loop. Typically, it would appear various solutions that attempt to solve the problem of the instrumentation:
Integration of existing sensors in a measurement loop, the driving idea in this case is to automate the offline sensors, so as to obtain, without human intervention, on-site measurements of variables directly involved in the material balance models. This is done from a sample implanted directly into the bioreactor, or more generally in a loop.
Coupling of indirect measurements and mathematical models to reconstruct the observers through the process variables (often called soft sensors or virtual). In most cases, this is a Kalman observer-type which allows the reconstruction of variables to control.
Development of specific sensors, known as biosensors, which are devices that permit, through a layer of ionic or molecular recognition, transform an “organic” information to an analog electrical signal. Their use remains limited, due to the degree of specialization measures and transfer limitations at industrial level.
Introduction to wastewater treatment
Wastewater treatment plants comprise various processes used for the reduction of contaminants in wastewater. A typical wastewater treatment plant includes a mechanical system and a biological process. The mechanical system consists of grids and sand filters for removing large objects as well as primary sedimentation for removing suspended solids. If not removed these objects, it may cause system blocks and damage equipment. A biological system is used for the reduction of organic matter and harmful nutrients such as nitrogen and phosphorus. The mechanical and biological systems of a wastewater treatment plant are shown in Figure 1.1 [15].
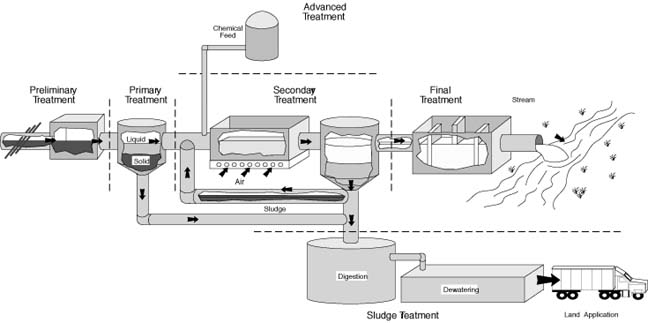
Figure 1.1: The mechanical and biological wastewater treatment systems [15].
Activated sludge process
The Activated Sludge Process (ASP) is one of the biological processes used at most wastewater treatment plants. This process is used biologically to reduce contents of organic matter, nitrogen and phosphorus in wastewater, if untreated the organic matter may cause oxygen depletion when discharged to the recipient water.
Nitrogen and phosphorus may stimulate undesired plant growth in the recipient water and thereby affect the ecosystem negatively. A typical layout of the ASP is shown in Figure 1.2 [15].
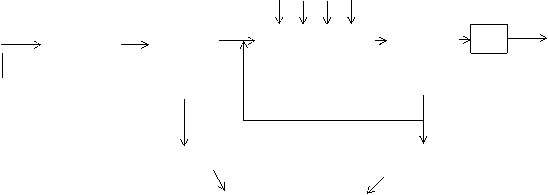
Figure 1.2: A typical layout of the activated sludge process [15].
A typical ASP consists of an aeration tank and a clarifier as shown above. In the aeration tank, microorganisms utilize oxidized organic materials for their growth and energy. Microorganisms then form a biological floc which gets suspended due to aeration. For 4 to 8 hours later the floc is allowed to overflow into the clarifier. After being in the clarifier for 1 to 2 hours, gravity forces the floc to settle in the bottom.
The settled material is then drained from the bottom while the treated wastewater is allowed to flow from the top of the clarifier. Organic matter leaves the system in three ways; as part of the settled material, as C02 or with the effluent [9]. The quality of the effluent depends on biomass growth in the aeration tank therefore a part of the sludge (settled biomass) is recycled back to the aerated tank to keep a balance between biomass concentration and waste material in the tank.
A basic ASP may be extended to include biological removal of nitrogen. Nitrogen removal requires a two-step configuration with aerobic and anoxic tanks. A basic ASP designed to include the biological removal of nitrogen is shown in Figure 1.3. In the aerated tank, ammonia nitrogen is converted into nitrate through nitrification process while in the anoxic tank nitrate is converted into nitrogenous gas through denitrification process. This is how nitrogen leaves the system: it is converted into a gas that disperses into the atmosphere.
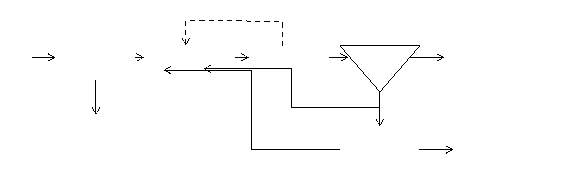
Figure 1.3: Typical layout of the ASP incorporating biological nitrogen removal [10].
A basic ASP may be further extended to include biological removal of phosphorus. Phosphorus in wastewater is in the form of polyphosphate granules. These polyphosphate granules are used as energy source by the Polyphosphate-Accumulating Organisms (PAO) under anaerobic conditions.
Modeling and identification of bioprocesses
The concept of dynamic model plays a key role in Automatic control. It is indeed based on the knowledge of the evolution through time of the process that occurs throughout the design, analysis and implementation of control and monitoring methods. As part of bioprocesses, the most common way to determine which models are used to characterize the dynamics of the process is to consider differential equations of material balances (and possibly of energy) of the main components of the process [5]. This type of approach is based on physical laws and/or fundamental principles (structured approach or non-structured) who highlight the internal functioning of the system, at least the macroscopic point of view. This is a modeling approach where the model parameters are related to the physical description of biochemical conversions. These models are very suitable for the design objectives, sizing and optimization of bioprocesses [18].
An important aspect of material balance models is that they consist of two types of terms representing respectively the conversion and transport. The conversion includes the kinetics at which the various biochemical reactions of the process take place and conversion efficiencies of various biomass substrates and products. The dynamics of transportation includes transit of the material within the process in solid, liquid or gaseous phenomena and phase transfer.
Control of bioprocesses
The process control aims are the improvement (optimization) of the performance, quality and economic efficiency of the processes while ensuring their safety general and that of operators, as well as respecting the legislation of the environment. In the context of bioprocesses, characterized by its nonlinear dynamics and complex nature, this objective may result in the development and implementation of hardware implementations and/or software, to maintain the biological process under operating conditions stable and, if possible, optimal in spite of internal/external perturbations could affecting their correct operation [5]. Disturbances that influence these systems are due to the nonstationarity of biological phenomena (internal variation) or action on the system of unknown inputs (not measured) such that the concentrations of different substrates, pH, presence of toxic, temperature, bias on the sensors and/or actuators, etc. [17]. Although the use of control strategies proves necessary to optimize the operation of biological processes, control, in the conventional sense employed in Engineering Sciences, today it is applied only hardly.
As we noted earlier, two types of difficulties largely explain this lack of generalized application of sophisticated control systems in bioprocessing: the first is related to the dynamics modeling of bioprocesses and the second is related to instrumentation and difficulty in measuring online reliably all the key variables of the process.
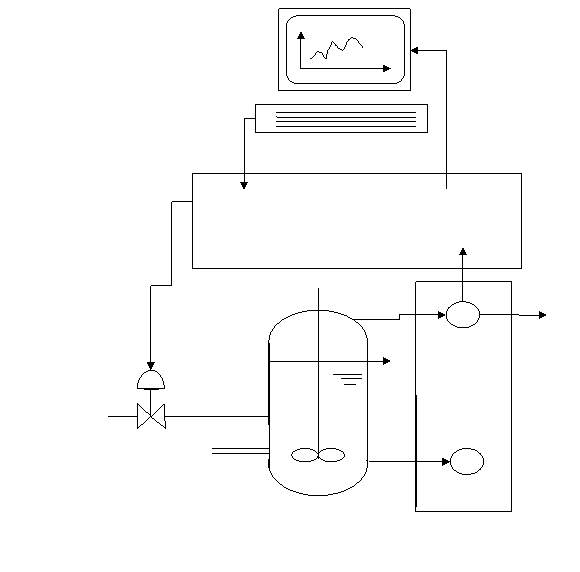
Figure 1.4: Representation of the control system of a bioprocess [5].
The use of a computer to monitor and control a biological process is shown schematically in Figure 1.4. The core of this scheme is the process (Represented here by a reactor). On this process, performs a series of measurements, either in the liquid (typically, measurements of pH, temperature, or concentrations), or in the gas (as measures gas flow rates). These measurements are sent to a computer that can handle them in a particular control objective (which could also be monitoring) of the process. The controller (here incorporated into the computer) is used to calculate a control action to be applied to bioprocess based on the measurements (physical and software), knowledge of process dynamics and the control objectives chosen. In the situation described, this control action is represented schematically by the opening of a valve for modulating the flow rate of substrate feed into the reactor. Its value is the output of a control algorithm that uses available information on the process. This information includes, on one hand, the state of the process until the time in question (i.e. measurements); a priori knowledge available, on the other hand (for example as a model of the type “material balance”) and related to the dynamics of biological processes and to the mutual interactions of different variables of the process. We find in the diagram the concept of closed loop. This loop consists of the entire process-sensor-computer-actuators.
Wastewater systems control
Traditionally, there has been very little emphasis on wastewater control systems; as a result, wastewater treatment plants are only equipped with simple control systems. These systems are mainly used for on and off control and for monitoring purpose. Dissolved Oxygen (DO) is the most commonly monitored and controlled variable of the Activated Sludge Process (ASP). DO sensors are used to monitor and relay measurement of DO to a computer. Simultaneously, a Programmable Logic Controller (PLC) controls the amount of DO supplied to the aeration tanks. Typically, a PLC is set to regulate DO value to 2 mg/l.
Cost minimization is an important factor in the operation of the wastewater treatment plant in order to run a plant economically, operational costs such as pumping energy and aeration energy should be minimized. At the same time discharges to water recipients should be kept at a low level. Minimizing the operational costs and at the same time treat wastewater properly lead to conflict of interest that must be solved. This conflict can be seen as a multi-objective optimization problem where effluent discharges must be balanced against operational costs. The main question is how to keep the effluent discharges below a certain pre-scribed limit to the lowest possible cost.
The main purpose of this project is to solve this optimization problem. This is solved through automatic control of the process. The objectives of automatic control are making the output signals of the system behave in a desired way by manipulating certain input signals that affect the behavior. The first step in the design of automatic control strategy is to determine which signals to control, which to measure or estimate and which control signal to use. The next step is to recognize the disturbances in the system. The last step is to derive the control signal to the system. Then, the control strategy for the process may be developed.
Controllable parameters
The ASP can be considered as represented by chemical and biological variables as shown Figure 1.4. The chemical group consists of variables such as temperature, DO, dissolved carbon dioxide, pH and flow rate. The biological group consists of concentrations of substrate and biomass. As opposed to the chemical variables, the biological variables are not measurable online. The chemical group controls enzyme activity of the microorganisms and in this way controls the biological variables. This means that if the optimal conditions for the chemical variables are reached according to some criteria, then, it will be reached for the biological variables.
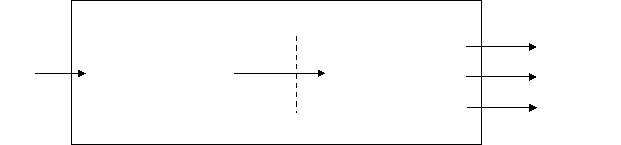
Figure 1.5: Dependence between chemical and biological variables.
KLa is the oxygen transfer coefficient and it describes the rate at which oxygen is transferred into the system. DO is the Dissolved Oxygen concentration. S is Substrate, N is Nitrogen and P is Phosphorus. The figure 1.5 shows how air an input to the chemical variables is controlled to give the DO output that is necessary to the biological variables. Figure 1.6 is an example of a closed loop system control of DO concentration in the aerobic tank of the activated sludge process.
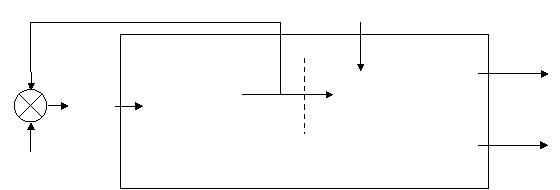
Figure 1.6: DO control of the Activated Sludge Control.
Disturbance factors in the activated sludge process
The main disturbance of the ASP is the inflow load, which is characterized by different values of the flow and waste component concentrations. The inflow characteristics change with the change of temperature, wind and time. The load change leads to changes of the environment conditions for the microorganisms, which requires different values of the DO. The required DO values are not always clear, it must be estimated or calculated in some way. The solution of this problem is to determine the required DO solving optimal control problem for the process.
Introduction to optimal control
Optimal control theory is based on the calculus of variations method: it is aimed at making functional reach minimum or maximum values. Optimal control is a mathematical optimization method for deriving optimal control trajectories.
The objective of optimal control is to predict best values of the control variable that will make the process behave in an optimal way. This means that a system must achieve effluent requirements while satisfying physical constraints of the plant. This is achieved through minimization of pre-specified optimality criteria [8].
From 1998 to 2004 the development of benchmark tools for evaluating by simulation, control strategies for activated sludge plants. The benchmark development has then being undertaken in Europe by Working Groups of COST Action 682 and 624. This work is now continued under the umbrella of an IWA Task Group.
The LQR technique (Linear Quadratic Regulator) is well known and accepted methodology for the synthesis of control laws for linear systems. However, most mathematical models for bioprocess systems, including the dynamic model of activated sludge (ASM1) studied in this thesis are nonlinear.
One of the latest methodologies for designing nonlinear controllers is the State Dependent Riccati Equation approach (SDRE) in the context of nonlinear control problems [3]. Mainly, the SDRE method is a systematic way to design controllers for nonlinear systems by factorizing the non-linearity state equations as a product of a matrix state dependent with state vector. This parameterization is not unique that gives flexibility in the design of controllers. The control law by feedback is then given by the solution of the state dependent Riccati equation.
SDRE technique is a powerful approach that can be easily applied to nonlinear systems and estimation problems of nonlinear state [2].
Problem identification
In most process industries, monitoring of the process and the process output is performed to achieve conformity with quality, safety and economic requirements imposed on the production. The level of monitoring differs from various fields and pioneering efforts are found in, for instance, the petrochemical and pharmaceutical industries. Wastewater treatment industries cannot be considered to be among the most diligent and systematic users of monitoring. These days, monitoring in wastewater treatment has mostly focused on a few key effluent entities upon which regulations are enforced by governments or other authorities. However, as more entities are regulated and the regulations become more rigid, the demands on the operation of the processes increase. Minimizing the use of resources, for instance; energy, chemicals, manpower, and decreasing the amount of sludge products produced, have become also important issues in order to adapt the wastewater treatment processes to the ideas of sustainability. The development towards more resource efficient and sustainable systems has led to an increased need of process and operation knowledge. Thus, new and upgraded wastewater treatment plants are equipped with measurement systems for collecting data on a large amount of entities. In large wastewater treatment plants, the data collecting system may include hundreds or even thousands of measured entities. The measurements are used for monitoring the process and the quality of the process output. Measurements are also used for control directly in control loops or indirectly as a basis for manual control actions.
The environmental and health policies state that the local authorities have to ensure effective performance by their habitation in terms of wastewater and sewage disposal. This includes adherence to local and international standards governing effluent wastewater disposal in recent years, these standards have been made severely in order to improve the state of the environment as well as cater for disposal problems due to growing urbanization and industrialization. As a result of these developments, there has been a lot of projects and support from the Algerian government towards research in environmental and wastewater treatment systems, with the main focus being on the designs of the wastewater treatment plants. Not much of the researches are directed towards wastewater treatment plants monitoring control systems.
Most wastewater treatment plants use simple feedback control systems with on and off capabilities. This is despite the fact that wastewater treatment processes are known to be highly complex and nonlinear in their nature. The other issue surrounding wastewater treatment plants is the high operational cost incurred.
Much of the operational cost is related to the electrical energy utilized during aeration, it is believed that electricity consumption makes up to more than 40 percent of the total operational costs [11]. It is also believed that the energy saving potential for wastewater treatment plants is very high. This potential can be reached through the use of advanced control and monitoring systems.
The dynamic complexities of wastewater treatment processes, the related energy cost and the strict effluent requirements cannot be dealt with by means of simple feedback systems. They require the use of advanced state of the art control systems, such as optimal control. The availability of on-line sensors and mathematical models makes it possible to design advanced control systems for the activated sludge process. Several advanced control strategies have previously been suggested by Bastin and Dochain (1990) [1]. Application of modern control theory in combination with new on-line sensors and the appropriate parts of advanced models has great potential to improve the effluent water quality, decrease the use of chemicals and save energy as well as money.
Motivation
Due to the varying operational conditions, process and quality variables need to be monitored continuously to ensure a reliable and efficient operation and, thus, daily average values are not sufficient to get early detections or warnings of deviating or abnormal conditions. Consequently, this calls for techniques to handle large data sets online. Methods for monitoring used today are normally based on time series charts, where the operator can view the different variables as historical trends. It is difficult to track more than a few variables and when the number of monitored variables increases, it is difficult to draw any conclusions. Moreover, collective effects cannot be assessed by individual investigation of variables. Therefore, methods must handle the difficulties involved in extracting information from multivariable data from the processes. These difficulties include large data sets, collinear data, data with nonlinear relationships, non-stationary data, data with dynamic relationships, noisy or unreliable data and missing data. Further, to be useful in the operation, the information must be presented in an understandable and easier interpretable way.
Control systems in wastewater have been recognized for almost 30 years but it has never been a major part of the wastewater treatment plant (WWTP) design. Many WWTPs have been designed and constructed without any attention given to the control systems.
Ideally, the information gained from process data is used to operate the process in the most efficient possible way. However, it is not always obvious how the information can be collected and then to be utilized to counteract a process deviation or disturbance. Biotechnological processes are known by their harsh environment and very expensive physical sensors. With a control system involving many local controllers, the cause-effect relationships may be complex and difficult to assess in time for possible corrections to have an effect on the disturbance. Some disturbances arise quickly, so a soft sensor and an operator support in the decision making is desirable.
According to Henze et al. [7] the application of control systems increases the capacity of the biological nutrient removal by 30%. In other cases, the application of control systems has significantly decreased operating costs.
Wastewater treatment plants are not always manned. This means that if a severe disturbance occurs, the time for reaction may be long. In these situations, a method to automatically derive and implement changes to the control system could provide a remedy. Automatic derivation and implementation of control system changes, typically set-point changes or invoking new control handles, can be obtained by integrating the control and the monitoring system. This has been done in many industrial fields, but in wastewater treatment, these supervisory or plant-wide control systems are still uncommon. However, a recent study shows that the wastewater engineers’ community now are beginning to show an increased interest in these issues [6]. Also, researchers have increased their efforts to develop control architectures that better suit the difficulties encountered in wastewater treatment operation [8]; [16]; [13].
Wastewater treatment plants are susceptible to a lot of disturbances; these disturbances are a reason for the plants control. The impact of the disturbances has to be compensated or eliminated before influencing the behavior of the plant.
Wastewater disturbances are related to varying influent flow concentration and composition and varying influent flow rates with time scale ranging between hours to months. Storms and peak loads also make up the disturbances; they prohibit steady state behavior of the plant. Traditionally, wastewater disturbances have been dampened by construction of bigger plants to attenuate large loads [7].
Wastewater systems are dynamic systems and any correction takes time before it can be noticed in the system. A wastewater treatment plant is always in transient state because of the varying influent flow rates, concentration and compositions. The control system has to recognize this and by online measurements and corrective actions bring the various process variables to their desired values.
Dissolved Oxygen (DO) concentration is a key variable in the operation of the activated sludge process. From a biological point of view, a choice of a proper DO set point is crucial. Insufficient air supply will influence the growth of the organisms, the floc formation and the settling properties of the sludge. The controller decision is based on the current state of the process obtained by a sensor and feedback.
Simple feedback control system requires information on the current state of the process. Optimal control systems have capabilities to use predicted disturbances to predict plant behavior and then calculate a proper DO control set point to attenuate the disturbance before it even reaches the plant. An example is the possibility for aeration to be increased before a load change hits the plant.
A robust nonlinear filter to estimate the process states and optimal control of wastewater treatment plants may provide more efficient and safer operation with a higher effluent water quality as a result. Moreover, it may also allow for new process designs and techniques with higher demands on the level of surveillance and control.
Statement of the problem
Main problems encountered during operation of an ASP are the stringent requirements on effluent quality and the high cost incurred. With the main contributor to the high operational cost being the aeration related energy cost.
The ASP requires oxygen for the minimization of carbon and nutrients in wastewater. Too much oxygen may decrease process efficiency and increase energy consumption. With too little oxygen, microorganisms may not perform well enough to remove harmful wastewater components. Finding adequate oxygen concentration in the aeration tank is the problem considered and solved in the thesis.
The aim is to determine the amount of DO concentration required for the process to produce the pre-specified effluent trajectories at a lower cost.
The second control strategy aims at the optimum use of the denitrification potential of the plant, selecting the most appropriate recycle flow of nitrates from the exit of the aerated volume to the anoxic zone. This means that there is maximum nitrates removal, maximum carbon consumption without oxygen and maximum recovery of the water alkalinity. For this purpose, the second control loop designed for the WWTP is continuously selecting the required recycle flow to maintain a low and stable concentration of nitrates at the end of the anoxic zone. A low nitrates set-point ensures the complete denitrification using the minimum recycle flow, with a minimum amount of recirculated oxygen and a maximum hydraulic retention time in the anoxic volume.
Research aim and objectives
The overall aim of the research project is to investigate and develop methods for calculation of the dissolved oxygen optimal trajectory and nitrate concentration that may later be used for real time optimal control of activated sludge processes. The idea is to estimate the states for the full ASP model to observe the behavior of the ASP based on values of the predicted influent concentrations. Then to pre-calculate values of the dissolved oxygen (DO) (in the aeration tanks) and nitrates (in the anoxic tanks) concentrations that forces the process to behave in a pre-specified manner. The calculated values are then treated as set points for the controller governing the rate of air supply to the real plant by so doing, it is certain that the controller considers the effect of the influent disturbances of the ASP. The aim is achieved through the following objectives:
Literature review and analysis
Analysis of the need for accurate estimator of the nonlinear dynamic model.
Literature review of the existing methods for state estimation and optimal wastewater systems control.
Design of models and methods for nonlinear optimal and robust filtering.
Analysis of the full ASP model to investigate its possibilities to be subject of a new observation and control approach.
Development of nonlinear filters based on the biological ASM 1 model: Extended Kalman Filter (EKF), State-Dependent Riccati Filter (SDRF), Extended H-infinity Filter (EHF) and State-Dependent H-infinity Filter (SDHF).
Design of algorithm computing State dependent optimal control
Formulation of the problem for optimal control.
Development of a nonlinear State-Dependent Riccati feedback corrector.
Development of software
Development of MATLAB software for simulation of the full model.
Development of MATLAB software for state estimation of the full nonlinear ASM1 model.
Development of MATLAB software for SDRE nonlinear control calculation
All programs for simulation.
Hypothesis
Disturbances to the ASP as well as the ASP nonlinear and complex dynamics make it difficult to use classical control systems for ASP control. These control systems require a priori knowledge of the process, which is very limited due to the lack of sensors for ASP components. The optimal control strategy is one of the best strategies to use because it utilizes the process model to predict the behavior of the process and calculate optimal controls to change the behavior of the process.
Delimitation
The research is based on the development of nonlinear soft sensors and methods for solution of the problem for nonlinear regulation of the activated sludge process. For the control system dissolved oxygen and nitrates is the chosen control variables.
The full Activated Sludge Model N°1 (ASM1) is used in the formulation of the nonlinear filtering algorithms and SDRE control problem. There are a lot of other biological models in the literature; which are not considered here.
The algorithm for calculation of the SDRE optimal control problem is implemented on MATLAB. To solve the formulated optimal control problem, the Lagrangian and the decomposition methods are used.
Assumptions
The research project is based on the following assumptions
The mass balance equations accurately represent the actual processes.
For optimal control problem solution, the predicted influent concentration characterized by the weather files is assumed to be a close approximation of the real influent concentration during the respective weather,
The settler is assumed to be without biological reaction therefore only steady state mass balance equations are used to model activities in the settler.
It is assumed that the activated sludge models give the correct representation of the actual processes,
Thesis outline
In this chapter, an introduction to the wastewater treatment processes is covered. Also covered are the following: statement of the problem, aim and objectives, hypothesis, delimitation, assumptions, and motivations. The rest of the chapters in the thesis are broken down as follows
Chapter 2 presents a state estimation literature review. This includes optimal estimation of static and dynamic random vector, some recent estimation techniques regarding robustness in linear and nonlinear systems.
Chapter 3 presents detail information regarding State Dependent Riccati Equation (SDRE) optimal filtering and control theory as well as literature survey with simple nonlinear application examples.
Chapter 4 includes a description and implementation of the Extended Kalman Filter (EKF), State-Dependent Riccati Filter (SDRF), Extended H-infinity Filter (EHF) and State-Dependent H-infinity Filter (SDHF) state estimation techniques for the unreduced ASM1 model. Then the algorithms for simulation of the models and state estimation are described. The results are given and discussed.
Chapter 5 describes methods used in developing the SDRE control strategy for activated sludge processes. This strategy is then applied to the IWA Benchmark Simulation Model (BSM1) in MATLAB simulation environment. Simulation results are then discussed.
Chapter 6 presents the conclusion and significance of the strategy. This chapter also includes discussion regarding limitation of the strategy, possible areas of applications and future expansion of the project.
References
Bastin, G. & Dochain, D. On-line Estimation and Adaptive Control of Bioreactor. New York: Elsevier, 1990.
Beeler, S. C., Tran H. T., and H. T. Banks, Feedback control methodologies for nonlinear systems, J. Optim. Theory Appl., 107 (2000), pp. 1–33.
Çimen, T. “State-dependent Riccati equation (SDRE) control: a survey”. Proceedings of the 17th IFAC World Congress (pp. 3761–3775),2008
Copp J. B. “The COST simulation benchmark: description and simulator manual”. Office for Official Publications of the European Community, Luxembourg, 2002
Dochain D. Automatique des bioprocédés. Hermès Science Publications, Paris(2001)
Jeppsson, U., Alex, J., Pons, M.N., Spanjers, H. and Vanrolleghem, P.A. (2002). Status and future trends of ICA in wastewater treatment – A European perspective. Wat. Sci. Tech., 45(4–5), 485–494.
Henze et al (2000). Henze, M., Gujer, W., Mino, T. & Loodrecht, M. 2000. Activated Sludge Models: ASM1. ASM2, ASM2D and ASM3: Report No.9. London: IWA.
Katebi, M. R., Johnson, M. A., Wilkie, J. and McCluskey, G. (1998). Control and management of wastewater treatment plants, UKACC International Conference on Control ’98 pp. 433–438.
Koketso, P. K. 2009. Investigation and development of methods for optimal control of the activated sludge process. PhD Thesis, Cape Peninsula University of Technology.
Lindberg, C. 1997. Control and estimation strategies applied to the Activated Sludge Process. PhD. Thesis, Uppsala University, Uppsala.
Motor Management Success. 2001. http://www.cee1.org/ind/mot-sys/ww/Kennewick_case.pdf [Retrieved 24 October 2012 at 23h07min].
OECD (Organization for Economic Cooperation and development) 2000, Report of the working group on harmonization of regulatory oversight in biotechnology. C (2000) 86/ADD2. Paris. http://www.oecd.org/sti/biotechnologypolicies/statisticaldefinitionofbiotechnology.htm . [Retrieved October 23rd, 2012; 16h58min].
Rodríguez-Roda I., Comas J., Colprim J., Poch M., Sànchez-Marrè M., Cortés U., Baeza, J. and Lafuente J. A hybrid supervisory system to support wastewater treatment plant operation: implementation and validation. Water Science & Technology, 45(4-5), 289-297 (2002).
Roux G. Contribution to estimation, observation and control of processes. Habilitation à Diriger des Recherches, Laboratoire d’Analyse et d’Architecture des Systèmes, Rapport LAAS No. 01650, Toulouse, France (2002)
Samuelsson, P. & Carlsson. B. 2001. Feed forward control of the external carbon flow rate in an activated sludge process. Water Science and Technology, 43(1}:115-122.
Sànchez, M., Cortés, U., Lafuente, J., Roda, I. R. and Poch, M. (1996). DAIDEPUR: an integrated and distributed architecture for wastewater treatment supervision, Artif. Intell. Eng. 10(3): 275–285.
Steyer J. P. Modélisation, Commande et Diagnostic des Procédés Biologiques de Dépollution. Habilitation à Diriger des Recherches, Laboratoire de Biotechnologie – INRA, Narbonne, France (1998).
Te Braake H, Babuska R, Vanca E, Hellinga C. Predictive Control in Biotechnology using Fuzzy and Neural models. In: VAN IMPE, J. F. M., VANROLLEGHEM, P. A., ISERENTANT, D. M., (Eds.), Advanced Instrumentation, Data Interpretation, and Control of Biotechnological Processes. Kluwer Academic Publishers, The Netherlands (1998).
Van Impe J. F. M, Vanrolleghm P. A., Iserentant D. M. Advanced Instrumentation, Data Interpretation, and Control of Biotechnological Processes. Kluwer Academic Publishers, the Netherlands (1998).
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


Related Content
All TagsContent relating to: "Technology"
Technology can be described as the use of scientific and advanced knowledge to meet the requirements of humans. Technology is continuously developing, and is used in almost all aspects of life.
Related Articles

DMCA / Removal Request
If you are the original writer of this dissertation proposal and no longer wish to have your work published on the UKDiss.com website then please: